🐙 When Nature Leads the Way in Robotics
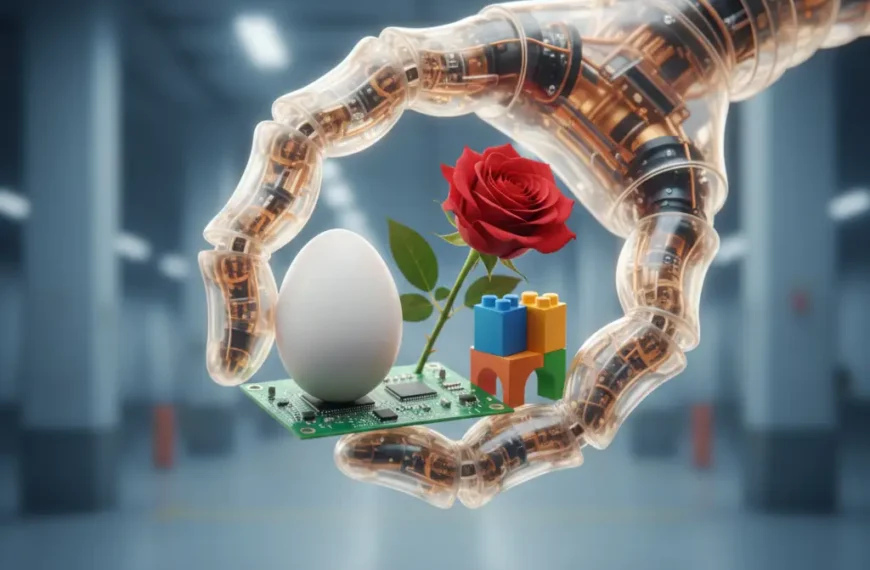
Imagine trying to pick up a single grape without crushing it, then immediately grasping a heavy rock, all with the same tool. For traditional robots, this level of versatile, delicate-yet-strong manipulation is incredibly challenging, often requiring multiple specialized end-effectors.
Yet, creatures like the octopus and the elephant perform such feats with astonishing ease. Their limbs, devoid of rigid skeletons, showcase a natural mastery of compliance and dexterity. It’s this innate genius that’s now inspiring a revolution in soft robotics.
By studying these biological wonders, engineers are learning to build robots that can interact with the world in a fundamentally gentler, more adaptable, and safer way. This field of bio-inspiration is unlocking new possibilities for automation.
—
🌊 The Octopus Arm: A Symphony of Unlimited Motion
An octopus arm is a marvel of biological engineering. Unlike our limbs, which move at specific joints, an octopus arm can bend, twist, and extend at any point along its length. It possesses what’s known as a virtually infinite number of degrees of freedom.
This incredible flexibility allows it to squeeze through tiny crevices, coil around objects of any shape, and delicately manipulate fragile items. The suckers along its length provide both strong adhesion and precise control, often working independently.
Lessons from the Ocean Depths
The key takeaway for roboticists is the octopus’s lack of rigid internal structure. Its movements are governed by a complex interplay of muscle contractions that stiffen or relax sections of the arm dynamically.
Soft robots inspired by the octopus often use fluidic actuation (like pneumatics) to mimic these muscle contractions. By inflating or deflating internal chambers, these robotic arms can bend and curl continuously, achieving truly remarkable dexterity.
Consider a soft robotic gripper designed to handle delicate pastries. Instead of rigid pincers, it might feature several ‘fingers’ that gently conform to the pastry’s unique shape, distributing pressure evenly to prevent damage.
—
🐘 The Elephant Trunk: Strength, Sensitivity, and Supreme Control
Moving from the ocean to land, the elephant’s trunk offers another masterclass in compliant manipulation. This remarkable appendage, containing tens of thousands of muscles, is strong enough to rip branches from trees yet sensitive enough to pick a single blade of grass.
It can function as a powerful lasso, a delicate probe, or even a snorkel. The trunk’s tip, with its finger-like structures, demonstrates incredible fine motor control, allowing for precise grasping and exploration.
Insights from the Savanna
The elephant trunk teaches us about achieving both raw power and extreme finesse within a single, continuous structure. Its ability to stiffen certain sections while keeping others flexible is a crucial design principle.
Soft robots inspired by the trunk are often designed with varying stiffness properties along their length. This might involve segments that can be selectively rigidized, allowing for stronger grip where needed, while maintaining flexibility elsewhere.
Think of a search-and-rescue robot that needs to navigate rubble. A trunk-inspired design could allow it to push aside heavy debris with a stiffened section, then delicately probe for survivors with a more compliant tip.
—
🎯 Shared Principles: Hyper-Redundancy and Embodied Intelligence
Both the octopus arm and the elephant trunk embody two critical principles that are central to soft robotics: hyper-redundancy and embodied intelligence.
Hyper-Redundancy Explained
Hyper-redundancy refers to having many more degrees of freedom than are strictly necessary for a given task. Instead of just a few joints, these natural manipulators have a continuum of movement points.
This abundance of flexibility allows them to find unique solutions to manipulation problems, adapting to unforeseen obstacles or shapes. For instance, an octopus can reach around a corner that a rigid robotic arm couldn’t.
The Power of Embodied Intelligence
As we discussed previously, embodied intelligence means the physical body’s shape and material properties do much of the ‘thinking.’ The natural compliance of an octopus arm or elephant trunk allows it to conform to an object without needing complex sensors or algorithms to plan every minute movement.
The very act of touching and deforming provides passive feedback, simplifying control. This design philosophy reduces computational complexity, making robots more robust and responsive to their immediate environment.
—
🛠️ Designing the Next Generation of Soft Manipulators
Engineers are actively translating these biological blueprints into tangible robotic solutions. The journey involves both material science and innovative control strategies.
Roadmap to Bio-Inspired Robots
- Material Selection: Choosing elastomers (like silicone) that mimic biological tissue properties, offering high flexibility and inherent damping.
- Actuation Mechanism: Developing systems like pneumatic networks, electroactive polymers, or shape memory alloys to induce continuous, muscle-like deformation.
- Structural Design: Creating internal channels and composite structures that allow for complex bending, twisting, and stiffening, much like biological muscles.
- Sensing Integration: Embedding soft sensors (e.g., strain gauges, pressure sensors) directly into the robot’s body to provide feedback without compromising flexibility.
- Control Algorithms: Developing simplified control strategies that leverage the robot’s embodied intelligence, rather than complex, joint-by-joint calculations.
—
💡 Practical Insights for the Future
The inspiration drawn from octopus arms and elephant trunks is transforming how we think about human-robot interaction and automation. These new robots promise a future where machines are not just efficient but also intrinsically safe and adaptable.
Soft robotic manipulators will excel in environments where traditional robots struggle. Think about assisting the elderly, handling food in processing plants, or even performing delicate surgeries. Their gentle touch and conformability are game-changers.
The goal isn’t necessarily to make exact copies of nature’s designs, but to understand the underlying principles that make them so effective. By applying these lessons, we can build a new class of robots that move with grace and interact with the world with unprecedented softness.
 By
By