🪱 Unsung Heroes of Locomotion
When we think of fast or powerful movement, our minds usually jump to legged creatures or winged fliers. Yet, some of the most adaptable and resilient movers on our planet are the humble earthworm and the intriguing inchworm.
These creatures navigate cluttered soils, narrow crevices, and complex terrain with an efficiency that defies their lack of traditional limbs. Their secret lies in a form of movement called peristalsis and highly coordinated body waves.
For soft robotics engineers, these ‘squishy crawlers’ offer a perfect blueprint for creating machines that can explore environments too confined or too delicate for wheeled or legged robots. It’s bio-inspiration at its most resourceful.
—
🌊 Peristalsis: The Earthworm’s Secret Weapon
The earthworm moves using a process known as peristalsis—a wave of muscular contraction and relaxation that travels along the length of its body. It effectively pushes itself forward by changing its internal body pressure and diameter.
The worm first anchors its rear segments using tiny bristles (setae), then contracts its circular muscles, making its front section long and thin to extend forward. Finally, it anchors the front, relaxes the circular muscles, and contracts the longitudinal muscles, making the body thick and pulling the back forward.
This alternating sequence of extending and thickening allows the worm to ‘swim’ through solid soil, efficiently tunneling and navigating without external structures. It’s a remarkable feat of mechanical self-propulsion.
Translating Peristalsis to Soft Robots
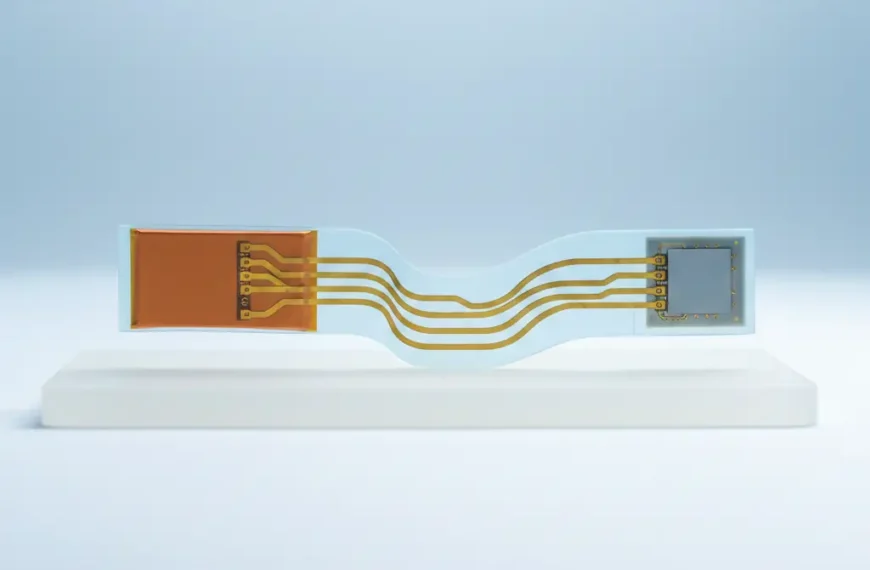
Peristaltic robots—often called ‘worm-like’ robots—mimic this fluid movement using internal actuators, most commonly pneumatic (air pressure) or hydraulic (fluid pressure).
The robot’s body is divided into a series of soft, interconnected chambers. By sequentially inflating and deflating these chambers, a mechanical wave is generated that propels the robot forward, allowing it to crawl through pipes, ducts, or even granular media.
This design is highly resilient to damage, as the mechanism is distributed across the entire body. If one section fails, the others can often continue the motion, ensuring mission continuity.
A key challenge is coordinating the timing of the waves. Unlike a rigid robot, where controlling one joint is simple, controlling a continuous wave requires precise sequencing of internal pressure changes across dozens of chambers. This often relies on AI and simplified mathematical models that view the body as a continuous medium.
—
📏 Inchworm Motion: The Art of Staged Anchoring
The inchworm, or looper caterpillar, offers another powerful lesson in efficient locomotion, primarily for surface crawling. Its movement is simpler than the earthworm’s, involving distinct anchoring points.
The inchworm first anchors its front legs, forms an arch with its body by pulling its rear end forward, and then anchors the rear. It subsequently releases the front anchor and extends its body forward in a straight line before repeating the cycle.
This method of movement is excellent for navigating surfaces, especially uneven ones. It provides superior stability and allows the creature to traverse gaps or climb vertical surfaces by leveraging strong, temporary adhesion.
Robotics of Staged Gripping
Inchworm-inspired robots are typically designed as multi-segment devices with alternating gripping mechanisms at each end. These mechanisms often utilize suction cups, specialized treads, or electro-adhesion pads.
A common design uses an inflatable middle section that extends when the rear gripper is anchored, and contracts when the front gripper is anchored. This creates a powerful, step-wise motion that is highly effective for climbing or navigating industrial pipe networks.
This type of movement trades the earthworm’s fluidity for reliable, staccato forward progress. It’s often favored in environments where gravity or high friction makes continuous wave motion less efficient.
—
🧭 Applications: Where the Squishy Crawlers Go
The unique strengths of peristaltic and inchworm-style locomotion make these soft robots indispensable in niche applications that rigid machines simply cannot handle.
Exploring the Inaccessible
Industrial Inspection: Peristaltic robots are perfect for inspecting the interiors of long, narrow pipes, air ducts, or ventilation shafts in industrial facilities, searching for cracks, blockages, or corrosion.
Medical Diagnostics: Miniaturized soft, peristaltic robots are being researched for navigating the human GI tract, offering a less invasive and more comfortable alternative to traditional rigid endoscopes.
Search and Rescue: Soft inchworm robots can climb over unstable rubble, anchor themselves securely, and extend their body into tight gaps in collapsed structures to search for survivors.
—
🛠️ The Engineering Roadmap for Soft Crawlers
Developing these bio-inspired crawlers requires a careful balance of material science, actuation design, and control systems. The goal is to maximize compliance while ensuring consistent, directed movement.
- Material Optimization: Selecting elastomers (like silicone) that are soft enough for compliance yet tough enough to withstand friction and repeated cycles.
- Actuator Design: Engineering internal fluidic channels and chambers for reliable, low-pressure generation of the traveling wave (peristalsis) or extension/contraction (inchworm).
- Friction Management: Developing strategies, like switchable adhesion or specialized ‘skin’ textures, to control the friction applied to the environment at anchor points.
- Simplified Control: Implementing simplified control loops that focus on generating the necessary traveling wave pattern rather than calculating every segment’s position precisely.
—
🌱 The Promise of Seamless Movement
The earthworm and inchworm, seemingly simple creatures, demonstrate a profound principle: flexibility and sequential movement can be a far more powerful solution than rigidity for navigating complexity.
By mimicking these ‘squishy crawlers,’ soft robotics is providing humanity with tools that can literally flow into otherwise impenetrable spaces. They promise a future where robots can seamlessly move through the natural and constructed world, no longer constrained by the need for wheels or hinges.
 By
By