🖐️ The Human Hand: The Ultimate Gripper
Think for a moment about your own hand. It can gently pick up a potato chip without breaking it, yet instantly exert enough force to tightly twist open a jar lid. This incredible versatility, transitioning seamlessly between delicacy and strength, is unmatched by most conventional machines.
Traditional robotic grippers—usually rigid metal claws or specialized suction cups—often lack this fundamental adaptability. They require complex sensors and programming to handle slight variations in object shape, and their stiffness makes them prone to crushing delicate items.
Soft robotics has taken inspiration directly from this biological masterpiece, using compliance and flexibility to create grippers that can truly ‘grasp gently.’ This is the next frontier in automation.
—
🤝 Compliance Explained: The Core of a Gentle Touch
In the world of soft robotics, compliance is the defining characteristic. It refers to the ability of a material or structure to yield, deform, or absorb force when interacting with another object. Essentially, the robot’s body gives way a little.
Our own hands are highly compliant. Our skin, muscles, and soft tissues deform when we pick up an object, allowing our grasp to conform perfectly to its shape, whether it’s a smooth marble or a crinkled leaf. This distributed contact minimizes pressure points.
Soft grippers replicate this using materials like silicone and rubber. When a soft finger presses against an object, it deforms around the object, achieving a wide contact area and ensuring a secure, yet gentle, hold.
—
🧠 Embodied Intelligence: Simplification Through Design
A rigid gripper needs to know an object’s precise location and geometry before calculating the exact clamping force. This demands sophisticated visual processing and complex computational resources—a major programming headache.
Soft grippers leverage Embodied Intelligence, meaning the physical form of the robot solves much of the control problem. The mechanical properties of the soft material automatically handle small misalignments and shape variations.
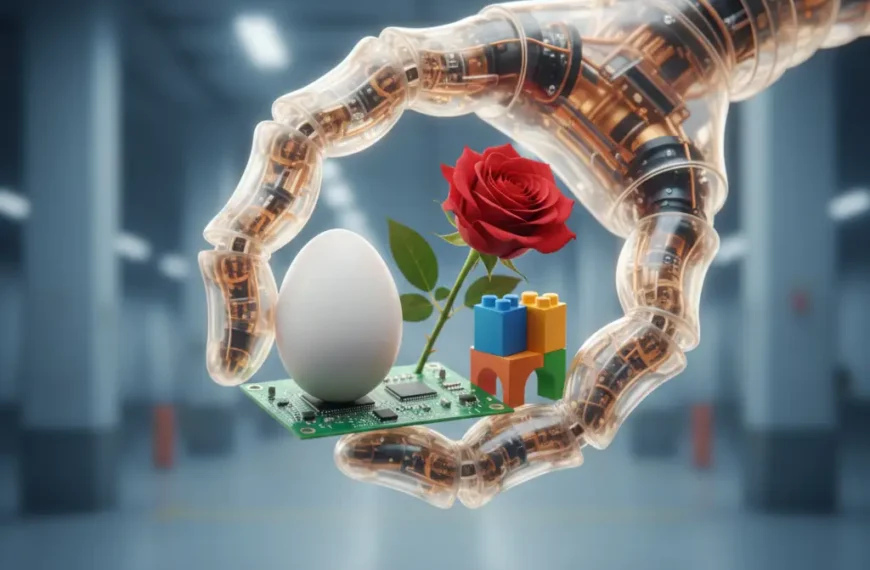
For example, if a soft gripper is told to close with a certain air pressure, it doesn’t need to know if the object is an egg or a small rock; its fingers will naturally wrap around it and stop pushing when the physical resistance is met.
Many soft grippers use pneumatic actuation (air pressure) to achieve their grip. Internal chambers inflate to curl the fingers, mimicking muscle contraction. This method is inherently safe because the maximum force is limited by the air pressure, making it easy to control the delicacy of the grip.
—
🍎 Applications: Where a Gentle Grip is Gold
The ability to handle objects with variable shapes and textures makes soft grippers indispensable in sectors where delicate handling is a premium, often replacing human labor in repetitive or hazardous environments.
Food and Agriculture
In harvesting and packaging, soft grippers can pick ripe fruits like strawberries or tomatoes without bruising them, drastically reducing food waste. Their compliance handles the natural variation in shape and firmness found in produce.
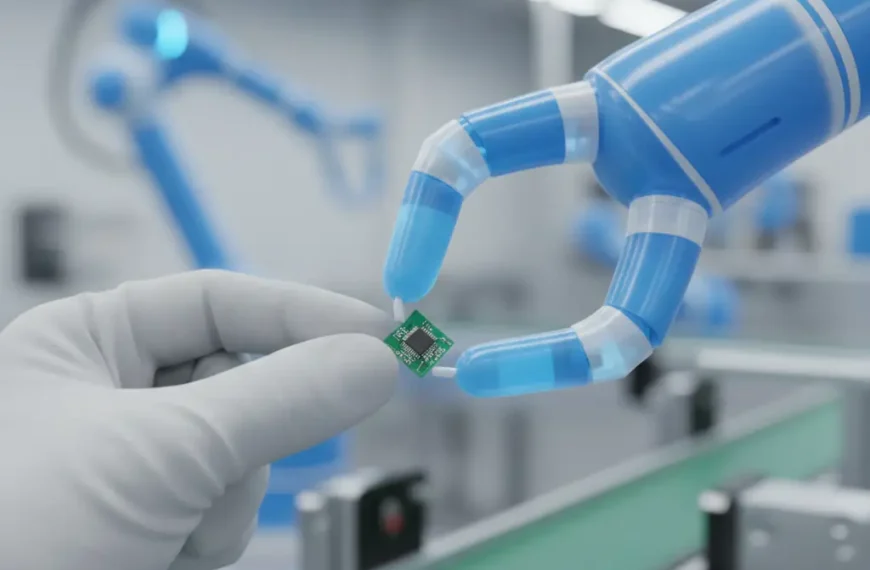
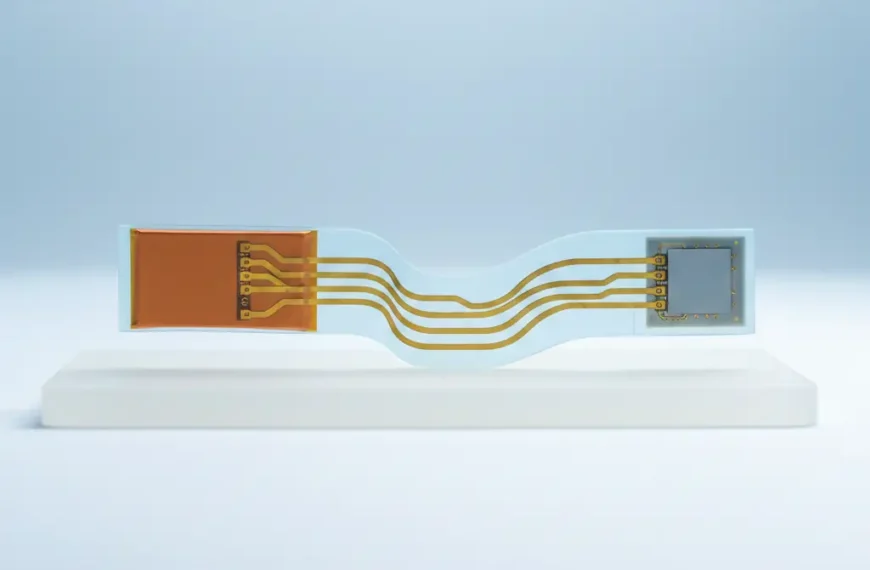
Electronics and Assembly
Modern electronic components, like flexible circuit boards or tiny sensors, are incredibly fragile. Soft grippers can securely handle these smooth, delicate parts without scratching, warping, or cracking them during assembly.
Human-Robot Collaboration
Soft grippers are a key feature of Cobots (Collaborative Robots). Their compliance ensures that if a human accidentally bumps the robot, the impact is minimized, allowing the robot to share a workspace safely without fencing.
—
🚀 The Future of Adaptive Manipulation
The development of soft grippers is moving beyond simple passive compliance toward fully active, adaptive systems. This includes integrating soft sensors that can detect texture and slippage, giving the robot a true ‘sense of touch.’
We are also seeing grippers with programmable stiffness, allowing them to switch from a soft, gentle mode for picking to a rigid, strong mode for transporting. This further bridges the gap between biological adaptability and mechanical strength.
By mimicking the nuanced, intelligent grip of the human hand, soft robotic grippers are not just automating tasks—they are making automation safer, smarter, and gentler, opening up applications we once thought were strictly human domains.
 By
By