👀 Giving Soft Robots the Sense of Touch
For a robot to interact safely and effectively with the real world, it needs more than just movement; it needs senses. Traditional robots often rely on external cameras or large sensors placed far from the action, but this isn’t enough for the nuanced, compliant movements of a soft machine.
Soft robots require a sense of touch that is as integrated and flexible as their bodies. This is the domain of flexible sensors, which are designed to stretch, bend, and conform along with the robot’s soft skin.
These specialized components give soft robots the ability to measure pressure (touch), measure strain (stretch), and understand their own body position (proprioception). It’s truly equipping them with an artificial nervous system.
—
🖐️ Feeling the World: Pressure and Touch Sensing
The first critical sense for a soft robot is touch. When a soft gripper encounters a delicate object, it needs to know precisely how much force it is applying to avoid crushing it.
Capacitive Sensors
One common type of flexible touch sensor is based on capacitance. These sensors work by measuring the electric charge stored between two conductive plates embedded in the soft skin. When pressure is applied, the distance between the plates changes, altering the capacitance.
This allows the sensor to quantify the force of a touch. For example, a soft robotic hand can use these sensors on its fingertips to detect the light pressure needed to pick up an egg without cracking the shell.
Resistive Sensors (Piezoresistive)
Another approach uses resistance. These sensors often use stretchable conductive materials. When pressure or strain is applied, the material deforms, changing its electrical resistance.
By measuring this change in resistance, the robot can map out the distribution of pressure across its surface—similar to how your finger pads feel the different textures and hardness of an object.
—
🤸 Knowing the Body: Strain and Proprioception
Proprioception is a biological term for the sense that allows us to know where our body parts are in space without looking. For soft robots, which lack rigid joints, this internal awareness is immensely challenging yet absolutely vital for control.
Because soft robots can bend continuously, they need to measure strain—the amount of stretch or compression—at every point along their body to determine their overall shape and position.
Embedded Strain Gauges
Flexible strain gauges, often made from stretchable polymers embedded with liquid metal or carbon nanotubes, are laced throughout the robot’s structure. As the robot bends, the conductive paths stretch, changing their electrical resistance.
The robot’s control system constantly reads these resistance changes, mapping its own complex, continuously changing geometry. This provides the ‘internal map’ needed for accurate motion planning.
Without this embedded proprioception, the soft robot would be moving blindly, unable to reliably complete even simple tasks like curling its arm to reach a target location.
—
🔄 Integration: Seamless Sensing Systems
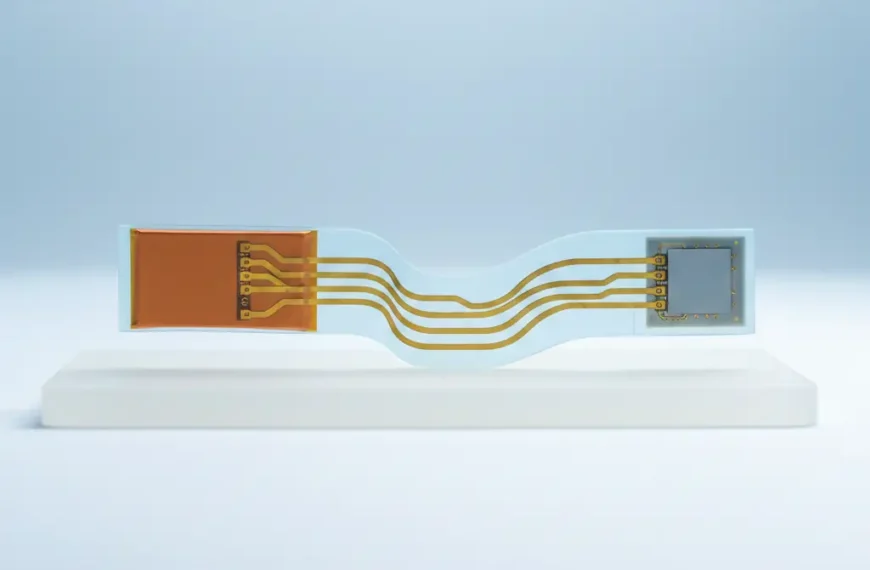
The goal is to move beyond discrete, separate sensors towards a unified, flexible electronic skin (e-skin). This e-skin must not interfere with the robot’s compliance while providing rich, multi-modal sensory data.
Fabricating these integrated systems is often achieved using advanced methods like printing liquid electronics or seamlessly encapsulating tiny, rigid sensor chips within flexible material matrices.
This holistic approach allows the robot to fuse information—for instance, combining strain data (body position) with pressure data (touch) to confirm a successful and stable grip on an object.
—
💡 The Impact on Human-Robot Interaction
Giving soft robots sensitive touch capabilities fundamentally changes how they can interact with the world, especially around people. Safety and functionality are drastically improved.
Example: In a hospital setting, a soft robotic arm assisting a patient can use flexible pressure sensors in its grippers to ensure it’s not applying too much force to a patient’s delicate skin while helping them sit up.
Furthermore, these sensors are essential for creating effective haptic feedback in wearable soft robots, allowing a user to ‘feel’ the texture of a virtual environment through a flexible glove.
—
📈 Pros and Cons of Flexible Sensing
While the benefits are transformative, flexible sensing technology still presents significant challenges that researchers are working hard to overcome.
| Pros of Flexible Sensors | Cons / Challenges |
|---|---|
| Seamless Integration into Soft Bodies | Signal Drift and Calibration Issues |
| Provides Proprioception (Body Sense) | Durability under Extreme Strain Cycling |
| Enables Gentle, Adaptive Gripping | Complexity of Data Processing (High dimensionality) |
| Enhances Safety for Human Contact | Cost of Fabrication and Maintenance |
—
🔮 The Future: A Truly Sensitive Robot
The ongoing development of flexible sensors and e-skins is rapidly moving soft robotics toward creating machines that are truly sensitive to their surroundings. The ultimate goal is a synthetic skin that rivals the capability of human skin.
A soft robot that can not only move gracefully but also feel, adapt, and perceive its own body position autonomously will unlock the next generation of reliable, intelligent, and safe robotic partners for our everyday lives.
 By
By