🦎 Nature’s Gripmaster: The Gecko’s Secret
Geckos are true marvels of bio-engineering. These small lizards can scale smooth glass walls, hang from ceilings with a single toe, and detach instantly without leaving any residue. Their secret isn’t glue or suction, but pure physics.
The gecko’s foot is covered in millions of microscopic, hair-like structures called setae, each splitting into hundreds of even finer structures called spatulae. These structures create an enormous surface area for contact.
When the spatulae get close enough to a surface, they engage the weakest but most ubiquitous force in nature: van der Waals forces. This natural adhesion principle is now the blueprint for a new class of soft robots.
—
🔬 Translating Setae: The Soft Adhesion Principle
Traditional adhesives, like sticky tape, rely on chemical bonding or viscous liquids, which leave residue and lose tackiness quickly. The beauty of the gecko’s grip is that it is a dry adhesive—it uses no residue and can be turned on and off instantaneously.
Soft robotics engineers are creating synthetic versions of these gecko-inspired pads, often called geckobots or stickybots. These synthetic pads are made from compliant polymers with surfaces patterned at the micro- or nano-scale to mimic the setae.
The compliance of the soft robot material is key. The entire pad must be flexible enough to conform perfectly to microscopic imperfections on a surface, maximizing the contact area and thus the van der Waals forces.
These forces are weak electromagnetic attractions between molecules. While tiny on an individual level, the millions of microscopic contacts provided by the synthetic setae add up to a tremendous gripping force over the entire area of the pad.
—
🧗♀️ Soft Climbing: Mobility on Vertical Walls
The primary application of gecko-inspired adhesion is, naturally, climbing. Soft climbing robots are designed to move across vertical, smooth, or challenging surfaces without the noise or power required by suction cups or magnets.
The On/Off Grip Mechanism
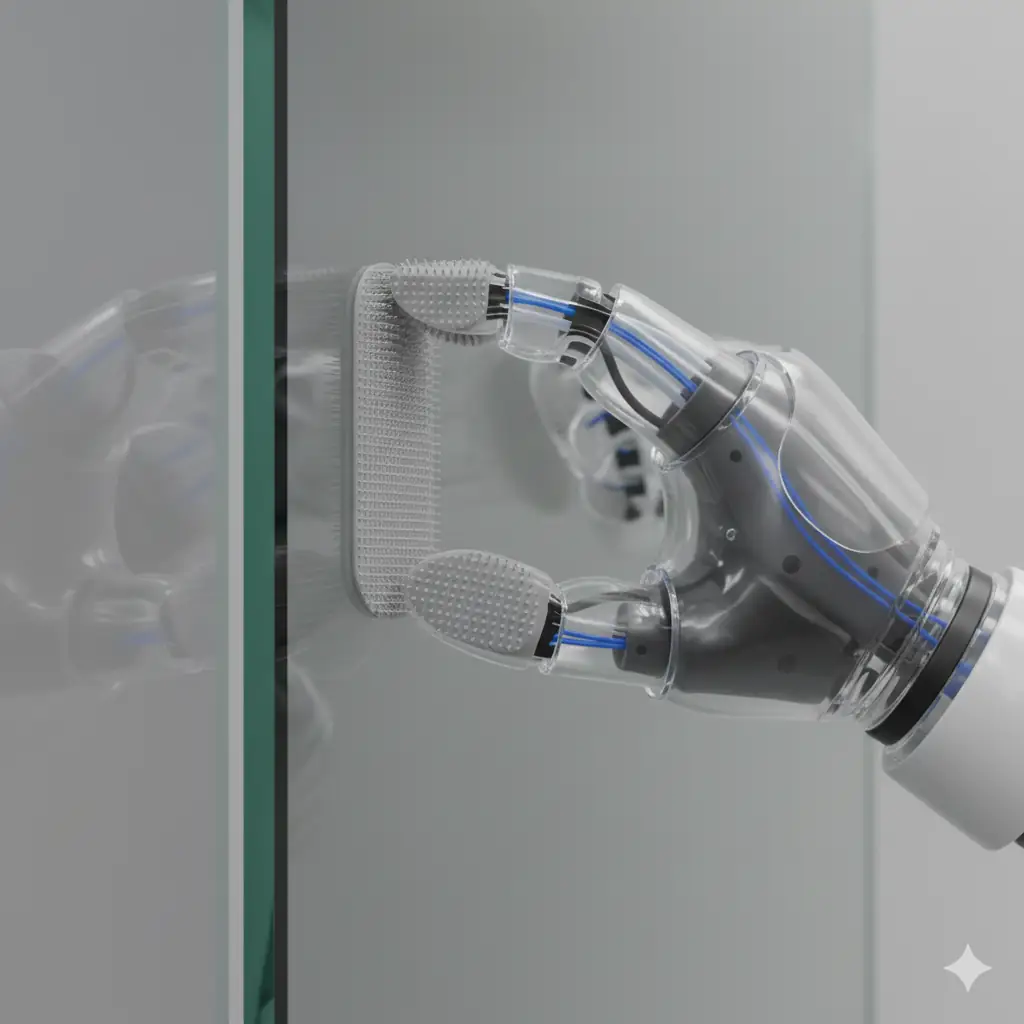
The gecko achieves detachment by simply changing the angle of its foot relative to the surface. Soft climbing robots use this directional principle. The adhesive pad is attached to a flexible actuator that controls the peeling angle.
When the robot wants to stick, the pad is pressed down flat. When it wants to detach, the soft actuator rolls the pad away from the surface at a steep angle, effectively turning the adhesion ‘off.’ This precise angular control is critical for efficient movement.
Advantages Over Traditional Methods
| Adhesion Type | Pros | Cons |
|---|---|---|
| Gecko-Inspired (Dry) | No residue, instant ON/OFF, low power for grip. | Sensitive to dust/moisture, requires high surface conformity. |
| Suction Cups | Strong grip on smooth surfaces. | Requires continuous power for vacuum, noisy, fails on porous surfaces. |
| Magnets | Very high load capacity. | Only works on ferromagnetic materials (steel, iron). |
—
🤲 Sticky Manipulation: Delicate and Residue-Free
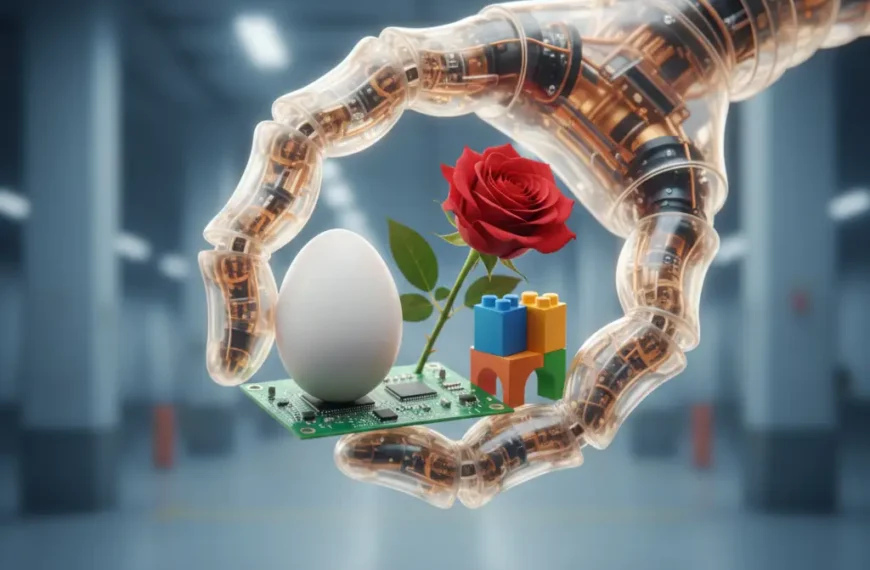
The usefulness of gecko-inspired soft pads extends beyond climbing. They are transforming manufacturing and logistics by providing a way to pick up incredibly delicate or flat, smooth objects without using vacuum or sticky adhesives.
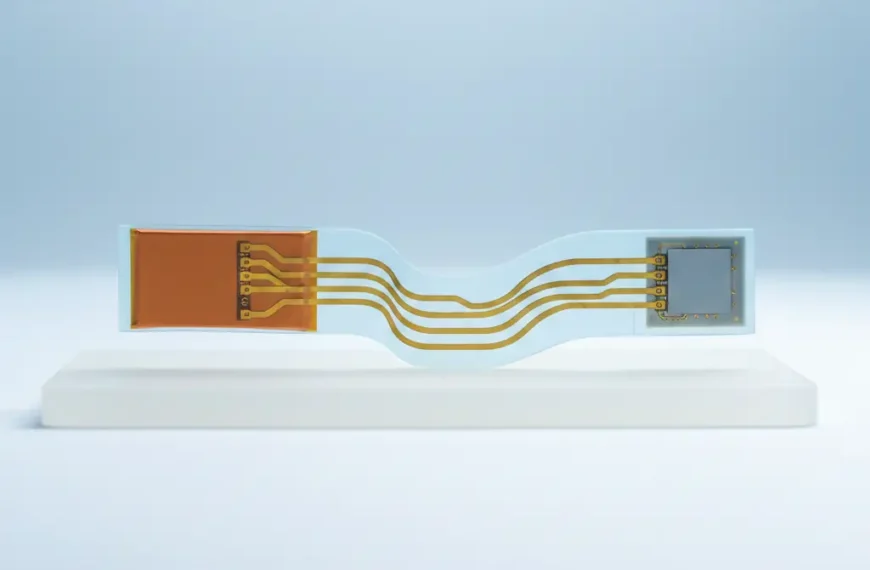
For example, in semiconductor manufacturing, soft grippers with gecko-like pads can gently lift and place ultra-thin silicon wafers, which are too fragile for mechanical grippers and too smooth for traditional suction cups to handle reliably.
The crucial benefit here is the residue-free handling. Since there is no adhesive liquid, the sensitive surfaces of electronics, lenses, or flat panel displays remain perfectly clean, ensuring the quality of the finished product.
—
🧭 The Compliance Factor in Adhesion
The soft nature of these robots is vital for the gecko adhesion principle to work. If the robot’s foot were rigid, even the smallest dust particle would create a gap, preventing the micro-hairs from making full contact and thus nullifying the van der Waals forces.
The soft, compliant polymer base ensures the adhesive pad can deform around dust or minor imperfections, maximizing the total area of microscopic contact. This physical adaptability is key to maintaining a strong bond on real-world surfaces.
The future of soft adhesion involves embedding flexible sensors into these pads. This would allow the robot to ‘feel’ the surface texture and adjust its adherence angle and pressure in real-time, optimizing the grip for different environments.
—
🌟 Applications of Gecko-Inspired Soft Robotics
The ability to securely grip and climb on almost any surface is opening doors for soft robots in several complex and demanding applications.
- Infrastructure Inspection: Climbing robots can inspect bridges, wind turbines, and spacecraft hulls, providing non-destructive testing without the need for scaffolding or rigid maintenance platforms.
- Micro-Gravity Handling: In space, where traditional grip relies on friction or magnetism, gecko grippers offer a residue-free way to anchor or manipulate objects on the exterior of satellites or space stations.
- Assembly Line Automation: Handling ultra-flat, smooth materials like glass panels, solar cells, and delicate wafers in cleanroom environments.
By mimicking the gecko, soft robotics is giving us the tools to defy gravity and handle the most delicate objects with a simple, clean, and elegant adhesive touch.
 By
By