💡 The Soft Revolution: Beyond Rigid Machinery
The world of robotics is rapidly moving from hard, clunky metal to soft, flexible materials. This shift, known as soft robotics, is creating machines that can interact with the environment and humans in fundamentally new ways.
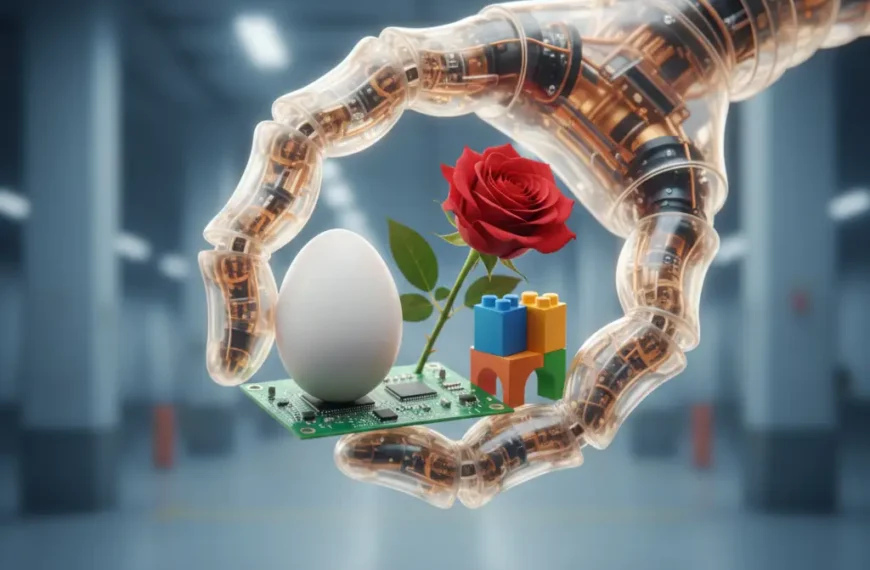
Imagine a gentle robotic gripper that conforms perfectly to an egg, or a medical device that navigates the body’s delicate pathways. These possibilities hinge on how we power and control them.
We’re moving past bulky external controls, which limit scalability and movement. The key is to embed the ‘muscles’ and ‘brains’ directly into the soft body itself.
This is where Soft Power Distribution comes in, utilizing embedded microfluidics and distributed pneumatics to create truly autonomous, flexible systems.
—
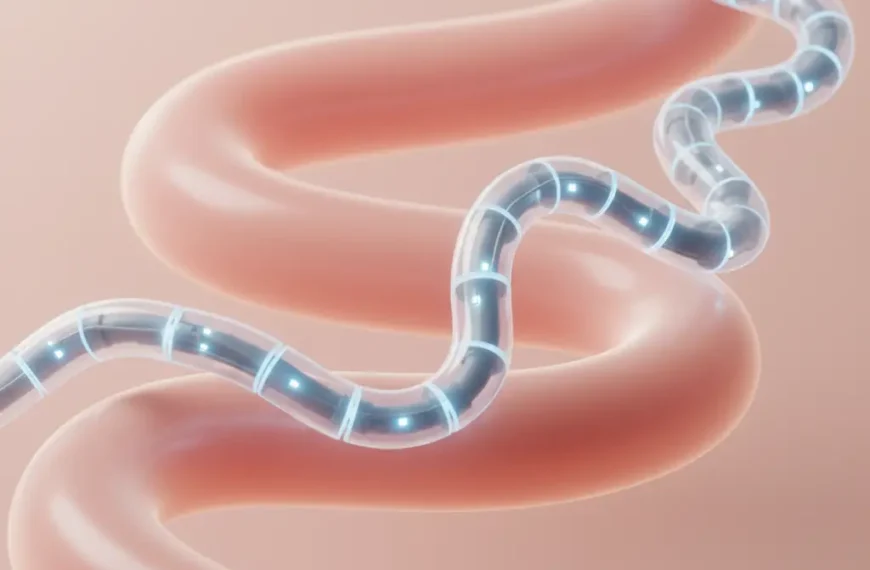
💧 Embedded Microfluidics: The Tiny Arteries of Control
What is Microfluidics?
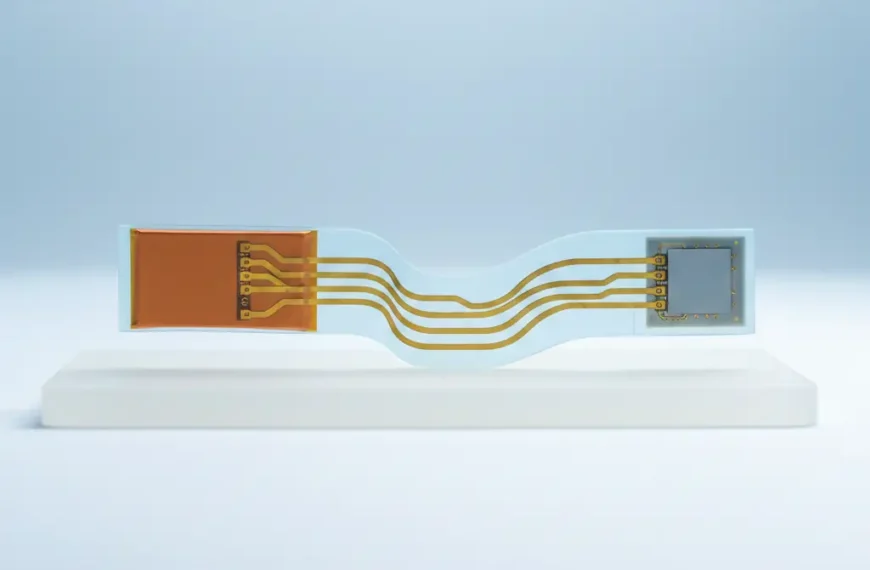
Microfluidics is the science of manipulating and controlling fluids—usually liquids, but sometimes gases—at the sub-millimeter scale. Think of it as plumbing on a chip.
In the context of soft robotics, these tiny channels, often etched into the body of the material (like silicone), act as the system’s signal network. They manage the flow of pressure that directs the robot’s movement.
Traditional robots use electrical wires for signals, but soft robots can use fluidic circuits that are fully integrated, making the entire device more compact and compliant.
The Shift to Fluidic Logic
The real innovation lies in using these channels to create fluidic logic circuits, which are analogous to electrical logic gates (AND, OR, NOT). Instead of electrons, we use pressurized fluid to switch states.
For example, a ‘valve’ in a soft robot might be a small channel that closes when pressure is applied from a separate control line. This allows for complex sequences and computation using only air or liquid.
This approach significantly reduces the need for heavy, power-hungry electrical components, paving the way for fully untethered and more ‘biologically’ organized machines.
—
💨 Distributed Pneumatics: Powering the Soft Actuators
Moving Power Closer to the Action
Pneumatics, which uses compressed gas (like air) to generate force, is the dominant technology for soft robot actuation. It’s light, cost-effective, and fast-responding.
In a distributed pneumatic system, the actuation force isn’t delivered from a single, distant external pump. Instead, the power control elements—the pneumatic ‘switches’ and ‘memory’—are spread throughout the robot’s body.
Imagine a series of tiny, interconnected balloons (actuators) along a robotic arm. The embedded microfluidic logic determines which balloons inflate and when, allowing for highly localized and nuanced movements.
The Benefits of Distribution
Distributing the control hardware offers immediate, substantial benefits. It minimizes the need for bulky, rigid external manifolds that connect to every actuator, a major limitation of older designs.
This local control drastically improves performance. By placing the valve close to the actuator, the pressure signal travels a shorter, clearer path, leading to faster, more precise, and more reliable control over the soft material’s deformation.
It also enhances the robot’s inherent softness and compliance. Since the control is integrated, the robot can remain entirely soft, which is crucial for safe human interaction and navigating tight spaces.
—
🛠️ Fabrication and Integration: Making it Real
Creating these integrated systems requires clever manufacturing techniques. Soft lithography—a process often using molds and curable polymers like PDMS—is key to fabricating the micro-scale channels and valves.
Researchers are even developing methods to pre-fabricate standardized pneumatic valves and then seamlessly embed them during the assembly of the soft device.
This modular, ‘plug-and-play’ approach allows for faster design iteration and mass production. Engineers can quickly rearrange the internal control architecture without needing to completely redesign the entire robot.
—
🛣️ The Roadmap to Autonomous Soft Systems
The evolution from simple soft actuation to complex, fully autonomous soft robots is following a clear path, driven by better integration of power and control.
Here’s a simplified look at how these technologies come together:
- Simple Actuation: External pump provides bulk air pressure; simple tubing inflates the robot part. (The basic ‘muscle’.)
- External Valve Manifold: A rigid box of valves controls which tubes receive air. (The basic ‘brain’ outside the body.)
- Embedded Valves: Pneumatic valves are integrated into the soft body but still connected to an external control line. (The ‘switches’ move inside.)
- Fluidic Logic Circuits: Microfluidic channels form logic gates (flipping switches) to decode signals. Minimal external lines needed. (The ‘brain’ logic is now soft.)
- Pneumatic Microprocessors: Complex circuits (like shift registers and memory) use only air to run complex, pre-programmed sequences. (The robot is fully ‘thinking’ with air.)
This final step, the creation of a pneumatic computer, is the ultimate goal. It means the robot only needs a basic external air source to operate its most complex functions.
—
🔮 The Future: Impact and Applications
The ability to build computation and power distribution directly into the structure of soft materials unlocks profound applications across various fields.
In medicine, we’ll see more advanced, gentler surgical tools and wearable devices that conform perfectly to the human body for rehabilitation or monitoring.
For manufacturing and logistics, soft grippers can handle extremely fragile items with unparalleled finesse, reducing damage and waste.
Ultimately, Soft Power Distribution is not just about moving fluids; it’s about fundamentally changing the nature of mechanical intelligence. It allows our robots to not only be strong but also to be naturally adaptive, compliant, and elegantly controlled from within.
 By
By