When we think of robots, we often picture rigid, metallic machines performing precise, isolated tasks. But the future of automation is looking a lot more like a colony of insects: soft, collaborative, and highly distributed.
This is the world of Soft Swarm Robotics, a fascinating blend of materials science and bio-inspired computing. It’s where the collective genius of ants and bees is translated into compliant, adaptable robotic units.
The Biological Inspiration: Swarm Intelligence 🐜🐝
At the core of this technology lies Swarm Intelligence (SI). This concept describes how complex, intelligent behavior emerges from a collective of simple agents following very basic local rules. No central brain is necessary.
Consider a colony of army ants. They form living bridges and rafts, tasks that are impossible for a single ant. Their success isn’t due to a leader giving commands, but to simple interactions like ‘follow the pheromone’ or ‘grab the nearest leg’.
Similarly, a bee colony efficiently manages foraging, defense, and nest maintenance. The hive mind isn’t a mind at all—it’s an intricate dance of localized sensory feedback and minimal communication.
From Rigid Structures to Compliant Materials
Traditional swarm robotics often relies on small, rigid robots like the Kilobots. They’re effective for simulations but struggle with real-world obstacles like uneven terrain or delicate objects.
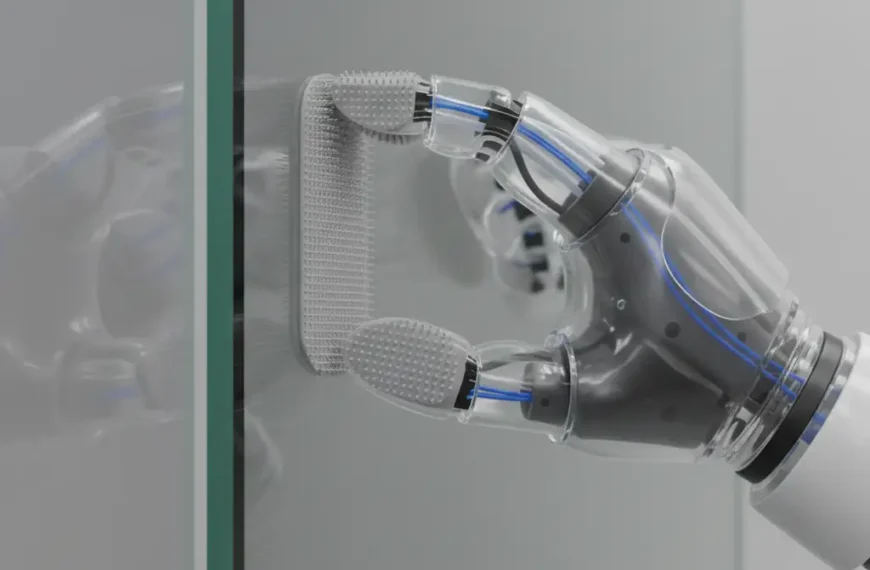
Soft robotics changes the game. By using compliant materials—silicones, elastomers, and hydrogels—the robots become inherently more forgiving and adaptable. They can deform, squeeze through tight spaces, and safely grasp fragile items.
Marrying swarm intelligence with soft materials creates a system that is robust, flexible, and capable of tasks that a rigid swarm simply couldn’t handle, such as navigating inside the human body or cleaning up oil spills.
Practical Insights: How Nature’s Rules Translate to Code
The rules governing insect swarms are elegantly simple, making them perfect for translation into robotic algorithms. The goal is to maximize collective output while minimizing individual complexity.
Here are some key behaviors translated from the hive and the mound:
- Pheromone Following (Ants): In robotics, this is modeled as virtual communication. A robot drops a digital ‘scent’ (data packet) indicating a resource or a hazard. Others follow the gradient to collectively optimize search patterns.
- Stigmergy (Bees & Termites): This is indirect communication through environmental modifications. Robots don’t talk to each other; they simply sense the physical changes left by their peers, such as a partially assembled structure, and respond accordingly.
- Load-Sharing (Ants): When an ant finds an object too heavy, it releases it and signals (via chemical or tactile means) for help. Soft swarm robots can use local force sensors to recognize when a load exceeds their capacity and automatically call for nearby units to link up and assist.
Micro-Case Example: Self-Healing Swarms
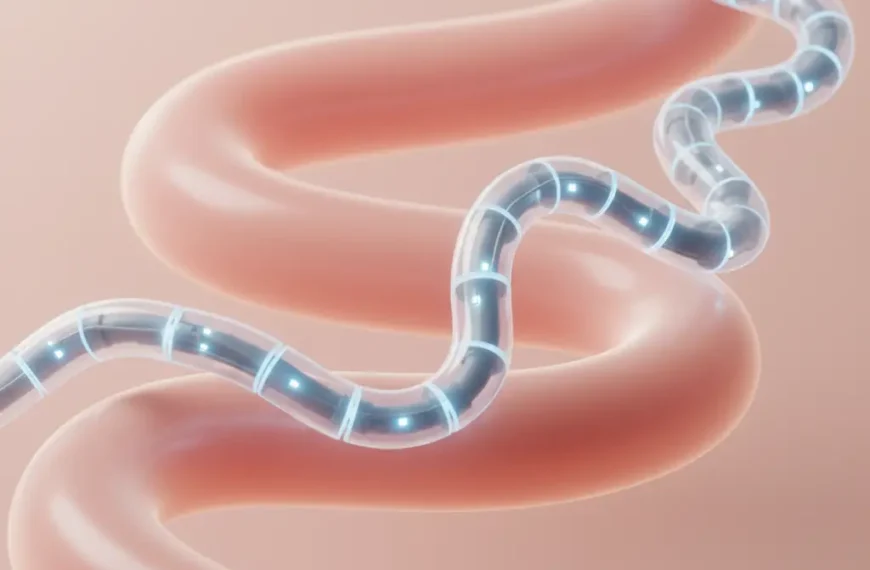
Consider the task of sealing a crack in a large pipe. A traditional, rigid swarm might be too brittle, and individual units could fail, leaving gaps. A soft swarm, however, can act like a biological plug.
By mimicking the way bees pack themselves into a honeycomb structure, soft robotic units can use their compliant bodies to conform to the crack’s irregular shape. They physically link and compress, creating a durable, sealed barrier. If one unit fails, the others immediately shift and deform to fill the void, demonstrating inherent self-healing properties.
The Advantages of Compliant Swarms 💡
The combination of soft materials and distributed control offers compelling benefits that rigid systems cannot match. This is where the practical application of this research truly shines.
| Feature | Benefit |
|---|---|
| Redundancy | Failure of a few units is irrelevant; the swarm adapts and the task continues. |
| Safety | Soft bodies are inherently safer for human interaction and delicate environments (e.g., medical). |
| Adaptability | The collective can reshape dynamically to the task, moving from a line formation to a gripping hand. |
The Road Ahead for Distributed Compliance
We are still in the early stages of mastering the material science and control algorithms needed for large-scale, soft swarms. Challenges remain, particularly around energy storage in flexible bodies and maintaining communication integrity during complex deformations.
However, the trajectory is clear. Just as nature found a way to build incredibly resilient and powerful systems from small, simple agents, soft swarm robotics promises to unlock solutions for environmental monitoring, disaster relief, and minimally invasive surgery that were previously science fiction.
By continuing to observe the masterful designs of the insect world, we can ensure that our robotic future is not only intelligent but also pliable, resilient, and deeply integrated with the complexities of the real world. This is truly the next frontier of organic automation.
Keep an eye on this space—the robotic hive is just beginning to buzz.

 By
By