🌿 Nature’s Engineers: Learning from Plants
When you think of a robot, you probably picture whirring motors, shiny metal, and complex circuits. But what if the best path forward for robotics is actually much softer, quieter, and slower? We’re talking about soft morphing, a field heavily inspired by the subtle yet powerful motions of plants.
Plants are masters of movement without having muscles, joints, or gears. They achieve incredible feats of shape-shifting using only hydraulics, chemical signals, and structural changes. Engineers are now learning to copy these silent movers to create the next generation of autonomous devices.
The Three Great Plant Movements We Mimic
Plants move in fascinating ways, but most of their actions can be grouped into three main categories. These are the blueprints engineers use to design soft, self-changing materials and robots. Let’s explore what these movements are and how they translate to technology.
1. Tropisms: The Guided Growth
A tropism is a directional movement, usually growth, that occurs in response to an external stimulus. The most famous example is phototropism, where a plant stem bends towards a light source to maximize its energy intake.
It’s a slow, steady, and purposeful movement. The plant’s cells on the side away from the light grow slightly faster, forcing the whole stem to curve toward the light.
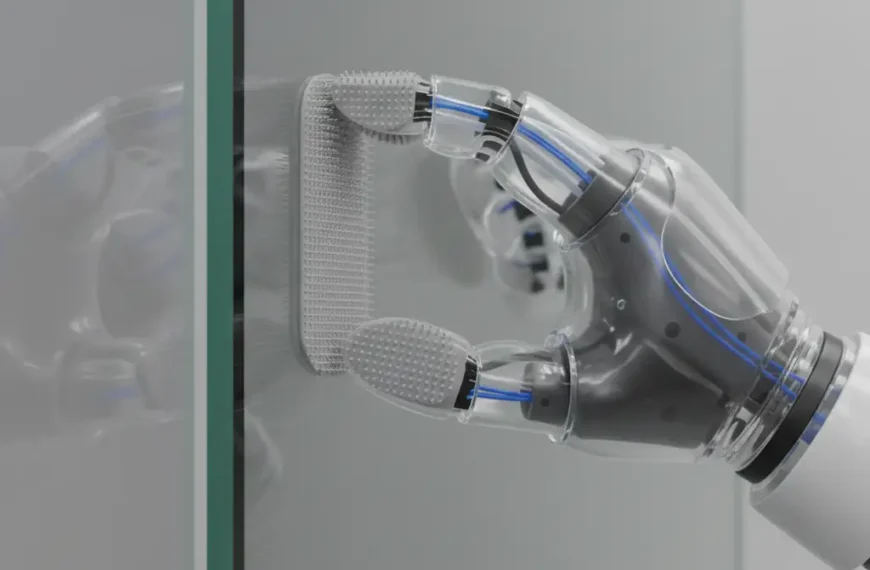
The Robotic Parallel: Engineers mimic this using materials that swell or contract differently when exposed to a specific trigger, like light or heat. A soft robotic gripper might be designed with a ‘light-seeking’ side that expands faster, causing the gripper to slowly bend and wrap around a target object only when illuminated.
This allows for highly controlled, energy-efficient shape change, perfect for applications where slow, persistent force is needed, like anchoring or delicate positioning.
2. Nastic Motion: The Quick Reaction
Nastic movements are non-directional, meaning the movement happens regardless of the direction the stimulus came from. They are also typically much faster than tropisms. Think of the famous Mimosa pudica (sensitive plant) that instantly folds its leaves when you touch it.
This rapid closure is achieved through quick changes in turgor pressure—water pressure—in specialized cells. It’s an immediate defensive or protective reflex.
The Robotic Parallel: To mimic this quickness, engineers use materials like hydrogels or shape-memory polymers. These materials can be triggered by a sudden change in humidity or temperature to contract or expand rapidly.
A device inspired by nastic motion could be a fast-acting valve or a self-sealing wound dressing that closes quickly in response to moisture, offering an immediate, automated response.
3. Growth-Like Actuation: The Permanent Change
Beyond simple bending, some bio-inspired systems mimic the continuous, irreversible process of plant growth. This is about changing the overall form and function of the material over time, effectively extending it or hardening it permanently.
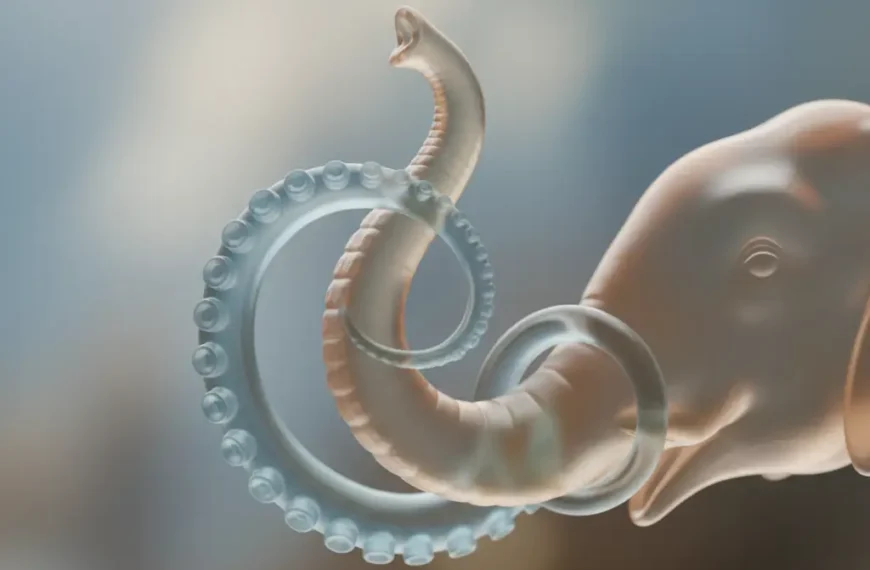
Think of a vine or a root that continuously extends and stiffens as it pushes through soil or wraps around a structure. This growth requires internal material synthesis and rearrangement.
The Robotic Parallel: This is arguably the most futuristic type of soft morphing. It involves embedding chemical reactants within the material that, upon activation, cause the material to permanently cure, stiffen, or even extend by creating new material layers.
This is crucial for repair and self-construction. For example, a robotic system could ‘grow’ an extension arm in place, or a structure could ‘heal’ a large crack by autonomously filling the gap and hardening.
The Mechanisms: How We Make Them Move
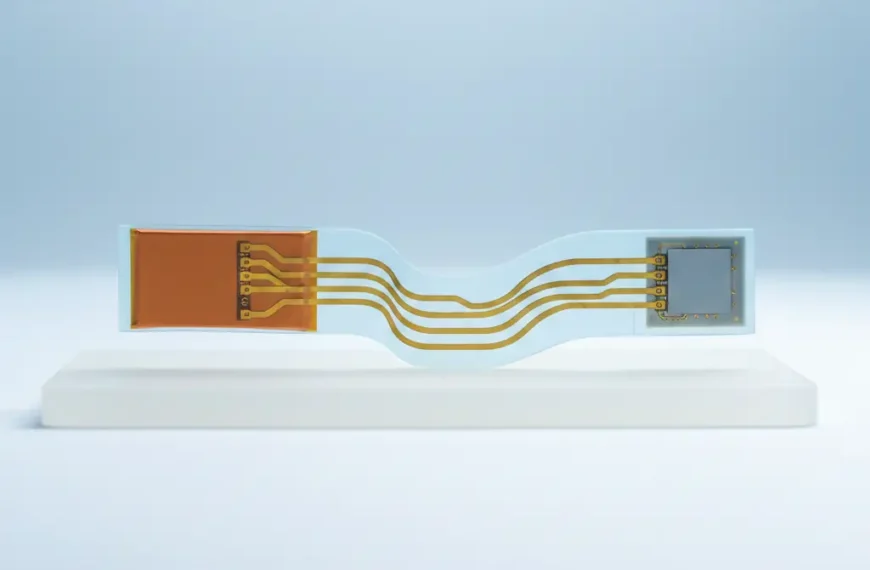
Since these soft systems don’t use motors, they rely on ‘smart’ materials that act as both the structure and the actuator. This is where clever material science comes into play. The most common drivers are light, heat, and moisture.
When exposed to the trigger, specific sections of the soft robot will expand (swell) or contract, creating the internal stress needed to achieve shape change, just like the difference in growth between a plant’s cells.
For instance, one side of a soft ribbon might be coated in a black material that heats up fast in sunlight, causing it to shrink, while the other side reflects light and stays cool. This unequal response forces the ribbon to curl and generate motion.
Comparing Soft and Traditional Robotics
Why bother with this slow, plant-like motion when we have powerful motors? The key is resilience, efficiency, and adaptability. Plant-inspired soft morphing offers unique advantages over conventional rigid systems.
| Feature | Soft Morphing (Plant-Inspired) | Traditional Robotics (Motors/Gears) |
|---|---|---|
| Energy Source | Ambient energy (light, heat, moisture) | Electrical power (batteries, wall outlet) |
| Complexity | Low; intelligence is in the material structure | High; complex control algorithms and wiring |
| Compliance/Safety | High; naturally flexible and gentle | Lower; rigid components can cause damage |
| Speed | Slow to medium (minutes to seconds) | Very fast (milliseconds) |
As you can see, soft morphing shines where high-speed action is unnecessary. Instead, it offers unmatched compliance, which is especially important when interacting with delicate, unpredictable environments, like inside the human body or near fragile ecosystems.
Looking Ahead: The Applications
The applications for plant-inspired soft morphing are still blossoming, but a few areas stand out as particularly promising. This technology could fundamentally change how we interact with the world.
- Self-Healing Structures: Materials that can autonomously grow or seal cracks when exposed to moisture, inspired by how plants heal wounds.
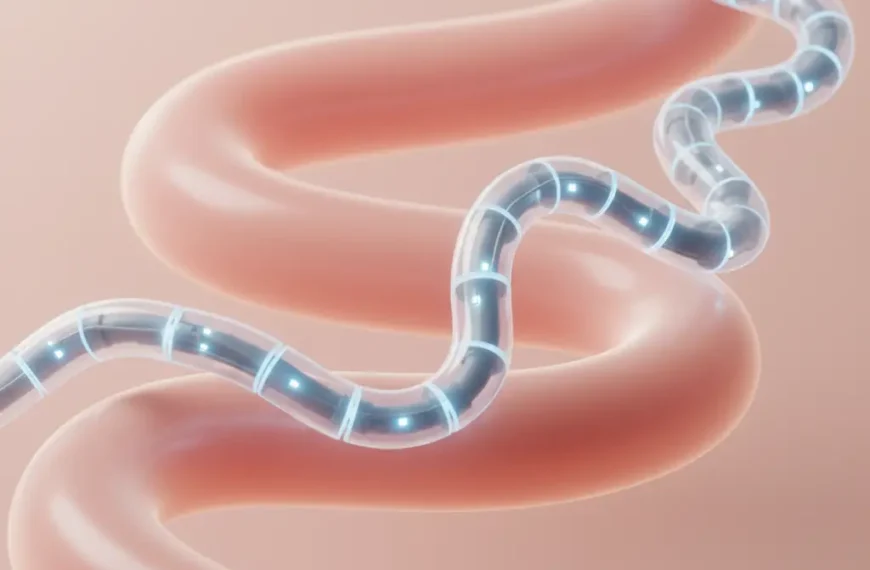
- Surgical Tools: Soft endoscopes or surgical grippers that gently conform to internal organs, minimizing trauma and utilizing body heat as their power source.
- Environmental Monitoring: Remote sensors that passively adjust their shape to face the sun or close into a protective ball when it rains, lasting longer without human intervention.
- Wearable Tech: Clothing or adaptive materials that change porosity (open/close tiny pores) to cool the wearer by reacting to body heat and moisture, like stomata in a leaf.
By studying the elegant, energy-minimizing strategies of plant movement, we are paving the way for a generation of robots and devices that are inherently more sustainable and integrated with their environment.
The quiet wisdom of the plant kingdom is finally starting to guide our engineering efforts, leading us toward a softer, more intuitive future of robotics.
 By
By