🤖 Two Philosophies of Automation
When engineering began, the logical approach to building machines was to make them as strong and precise as possible, relying on rigid materials like steel and aluminum. This gave rise to the classic, powerful industrial robot: a tireless worker built for accuracy.
Today, a contrasting philosophy has emerged, taking inspiration from biology’s flexible designs. This movement, soft robotics, argues that compliance and yielding are often more advantageous than sheer stiffness, especially when interacting with humans and delicate objects.
Understanding the fundamental differences between these two design principles—rigid vs. soft—is key to grasping the future of automation and knowing which tool is best suited for any given task.
—
📏 The Rigid Robot: Precision and Power
The traditional, or rigid, robot is defined by its robustness and ability to execute tasks with incredible repeatability. If you need to place a component within a few micrometers, a rigid machine is the undisputed champion.
Defining Features of Rigid Robots
Rigid robots rely on powerful electric motors and gears (servos) that drive movement through fixed joints. The materials used, like metal and hard composites, resist deformation, ensuring that a commanded movement is executed with minimal deviation.
This stiffness grants high precision, speed, and the capacity to handle heavy payloads. The accuracy is so high that these robots are essential for tasks like welding car bodies or assembling high-density circuit boards.
However, this stiffness is also a major drawback. If a rigid robot encounters an object that is slightly out of place, or if it collides with a human, the unyielding force can cause significant damage to the object or injury to the person.
—
🐙 The Soft Robot: Compliance and Adaptability
The soft robot is the antithesis of the rigid machine. Its defining characteristic is compliance—the ability to safely deform and conform to external forces and the shape of objects it encounters.
Defining Features of Soft Robots
Soft robots utilize flexible elastomers (like silicone), hydrogels, and soft fabrics. They move using motorless actuation methods, such as internal air pressure (pneumatics) or smart materials like Dielectric Elastomers.
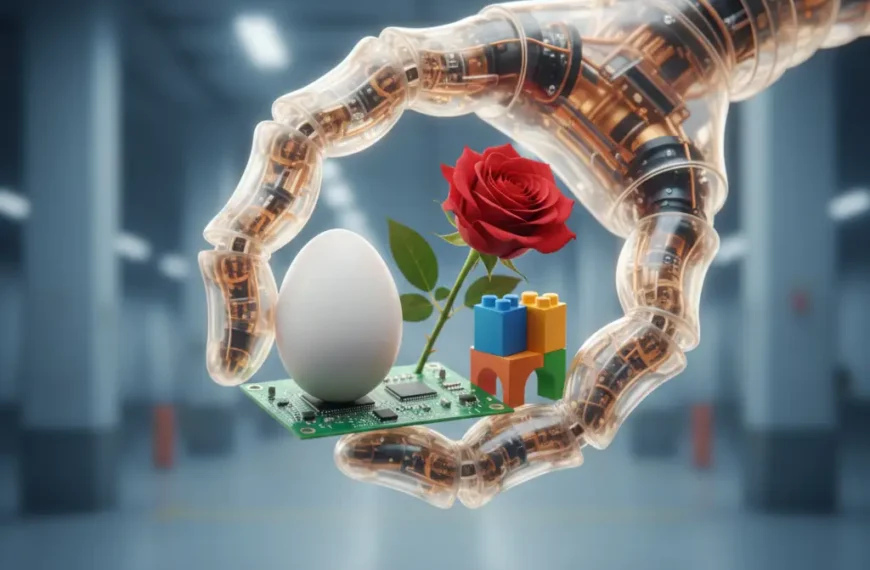
This design grants inherent safety for human interaction and unmatched adaptability in unstructured environments. Imagine a soft gripper wrapping around an irregularly shaped fruit—its body simplifies the grasping problem.
The trade-off, however, is performance. Soft robots are generally slower, carry lighter loads, and struggle to achieve the sub-millimeter precision that their rigid counterparts deliver effortlessly.
Rigid robots embody the ‘brain first’ philosophy, where the control system (software) must compensate for the body’s physical limitations. Soft robots embody ‘Embodied Intelligence,’ where the body (material and shape) passively solves problems, simplifying the software needed.
—
⚖️ Comparing the Critical Trade-Offs
The choice between soft and rigid design is always a strategic decision based on the primary requirement of the task. The core comparison lies in the relationship between precision and compliance.
1. Safety and Human Interaction
In environments shared with people (e.g., hospitals, homes, collaborative factory floors), soft robots are inherently safer due to their ability to yield upon impact. The energy absorption minimizes harm.
Rigid robots, even modern cobots, require complex external sensing (extrinsic safety) to monitor their environment and stop upon collision, whereas soft robots are intrinsically safe.
2. Precision vs. Adaptability
If a task requires placing a pin into a hole with extreme accuracy, rigid precision is necessary. If a task requires picking an object from a messy pile, soft adaptability is superior.
The rigidity of a traditional arm locks in its ability to be precise. The compliance of a soft arm locks in its ability to adapt to variability, such as handling delicate produce of slightly different sizes.
3. Control Complexity
Controlling a rigid robot is complex, but the math is straightforward (finite number of joints). Controlling a soft robot is mathematically far more complex due to infinite deformation points, which often necessitates the use of advanced AI and Machine Learning to manage the complexity.
—
🔮 Convergence: The Future of Hybrid Design
The future of robotics is unlikely to be exclusively soft or exclusively rigid. Instead, we are moving toward hybrid systems that strategically combine the best elements of both worlds to maximize versatility.
One example is programmable stiffness, where soft robots can instantly switch from a compliant, gentle state to a rigid, load-bearing state using techniques like granular jamming. This allows a robot to be soft when moving and rigid when performing a task.
Another convergence involves pairing a robust, high-speed rigid arm with a sensitive, soft robotic end-effector (gripper). The rigid base provides speed and range, while the soft gripper provides the necessary gentle touch for the final interaction.
—
🎯 Practical Insights for Deployment
To choose the right robot, you must first define the core challenge. Are you optimizing for speed and unyielding accuracy, or for safety and graceful adaptability?
- Choose Rigid when: Task requires sub-millimeter accuracy (e.g., semiconductor manufacturing) or must lift very heavy loads (e.g., automotive assembly).
- Choose Soft when: Task involves direct human contact (e.g., patient care), requires handling variable or fragile items (e.g., agriculture), or needs navigation through unstructured, tight spaces (e.g., search and rescue).
The comparison between soft and rigid robotics is less about one being better than the other, and more about achieving the perfect balance of compliance and precision for the job at hand. The modern engineer now has a much more versatile toolkit at their disposal.
 By
By