⚙️ The Motorless Movement: A Soft Approach to Power
In traditional robotics, movement is achieved through rigid electric motors and complex gearboxes, or servos. These components are powerful and precise, but they are also bulky, heavy, and introduce potential pinch points—all of which clash with the core philosophy of soft robotics.
Soft robots require an entirely different way to move, one that respects their compliant bodies. Their motion must be distributed, fluid, and scalable without introducing stiffness. The solution lies in ingenious forms of actuation that mimic biological muscle function.
Instead of relying on rotational energy from a motor, soft robots utilize changes in pressure, volume, or electrical fields to generate movement. This allows for smooth, continuous bending and twisting, rather than jerky movements at fixed joints.
—
💨 Pneumatic Actuation: Power from Compressed Air
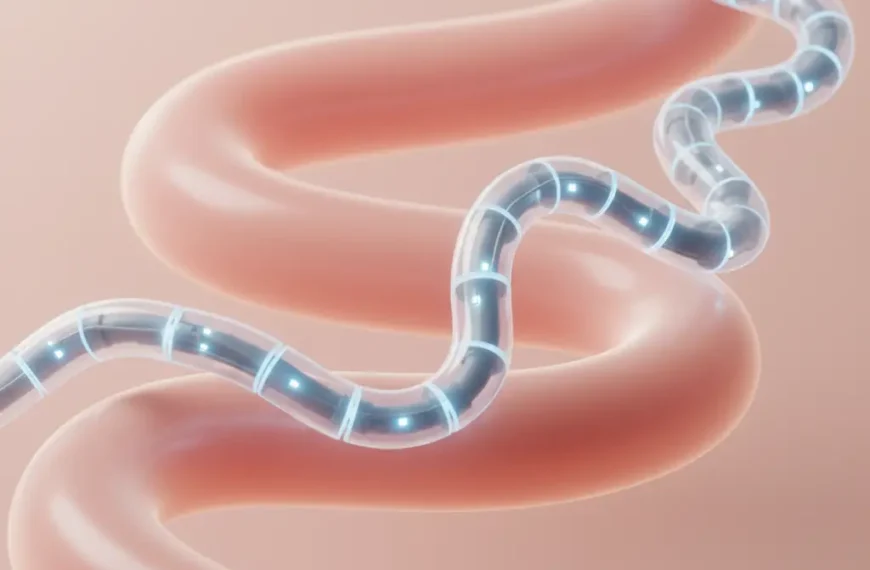
Pneumatic actuation is arguably the most common and accessible method for powering today’s soft robots. This technique uses pressurized air to create movement, similar to how air inflates a balloon or tire.
In a soft robot, air is pumped into internal channels molded directly within the flexible body, usually made of silicone. The expanding air causes the robot’s structure to deform, resulting in a predictable movement like bending, extending, or curling.
PneuNets: The Networked Muscle
A highly popular design is the Pneumatic Networks (PneuNets) actuator. This structure consists of internal chambers and inextensible layers. When inflated, the chambers expand, but the inextensible layer on one side prevents expansion in that direction.
The result is that the actuator curls or bends away from the stiff layer. Imagine inflating a tube that has tape running along one side; the tube can only expand outward on the untaped side, causing it to bend into an arc.
Pneumatics are favored because they are lightweight, easily controlled using valves, and allow for safe, rapid movements compatible with soft, elastic materials. The trade-off is often the need for an external pump or air supply.
—
🌊 Hydraulic Actuation: Force from Fluid Pressure
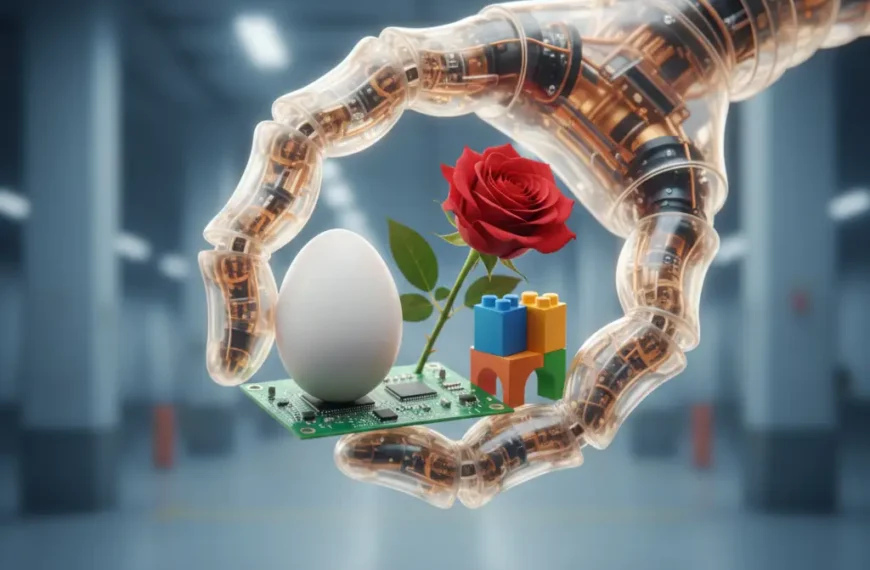
Similar in principle to pneumatics, hydraulic actuation uses incompressible liquids (like water or oil) instead of air pressure to generate force. This method is often chosen when the robot needs to generate significantly more power.
Since liquids cannot be easily compressed, introducing a small volume of fluid into a soft chamber can generate very high forces. This makes hydraulics ideal for heavy-duty soft grippers or industrial applications that require a strong, compliant squeeze.
For example, a hydraulic soft arm might be used to securely lift and transport heavy, irregularly shaped objects, leveraging the strength of the fluid while maintaining the gentleness of the soft material.
The challenge with hydraulics often involves sealing the fluids to prevent leaks and managing the slightly heavier weight contribution of the liquid compared to air.
—
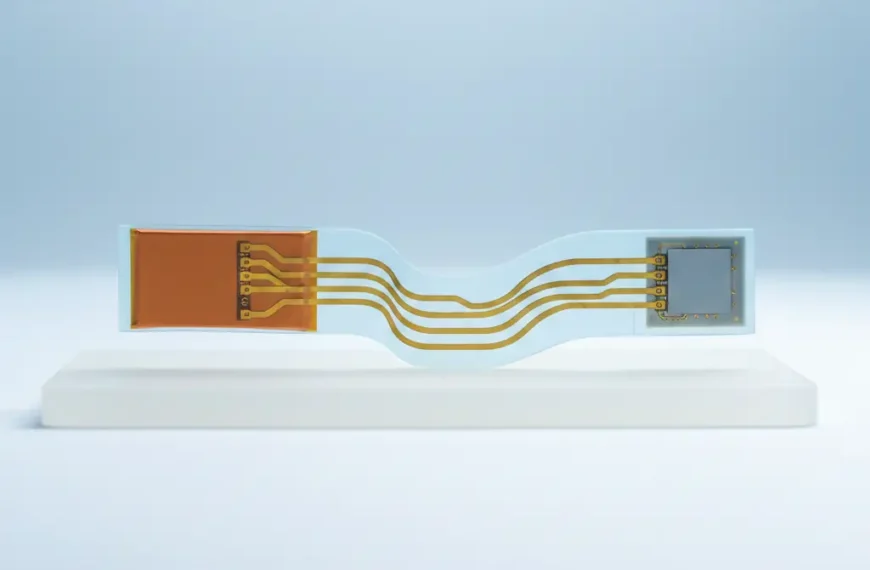
⚡ Dielectric Elastomers: The Artificial Muscle
Moving away from pressure-based methods, Dielectric Elastomers (DEs) represent an entirely different class of soft actuator. They are part of the ‘smart materials’ family, sometimes called electroactive polymers (EAPs) or ‘artificial muscles.’
A dielectric elastomer actuator consists of a thin, flexible elastomer film sandwiched between two flexible electrodes. When a high voltage is applied, the positive and negative charges on the electrodes attract each other.
This attraction squeezes the elastomer, causing it to thin out and expand outward, generating movement. When the voltage is removed, the material snaps back to its original shape.
—
The Power of Electrostriction
DEs are appealing because they offer a high power-to-weight ratio and can be silent and rapid. They eliminate the need for cumbersome external pumps or fluid lines, leading to truly untethered soft robots.
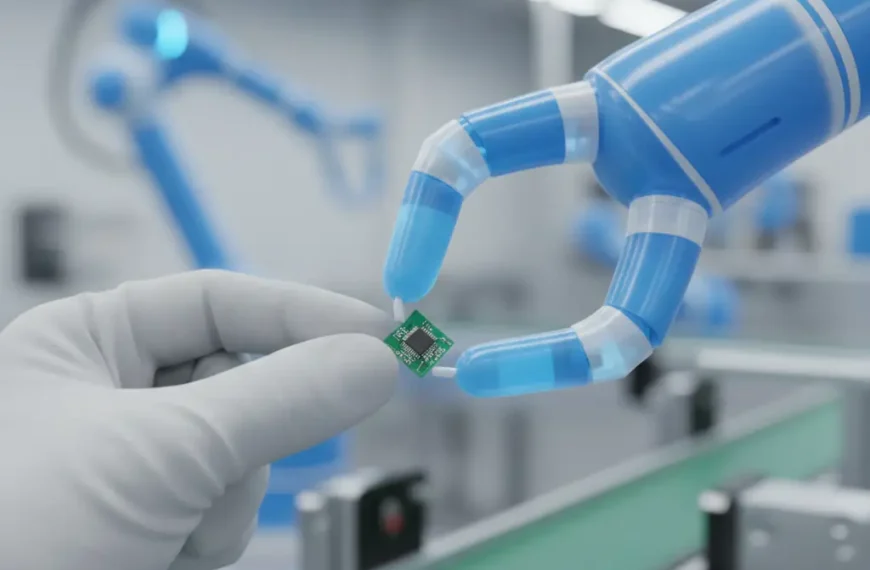
Imagine a tiny soft robot designed for inspecting circuitry. It could use DEs to perform precise, muscle-like contractions to crawl or manipulate microscopic parts, all powered by an onboard battery.
However, DEs typically require high voltages to operate, posing challenges for power management and safety. Research is constantly focused on reducing the required voltage while increasing the achievable strain (movement distance).
—
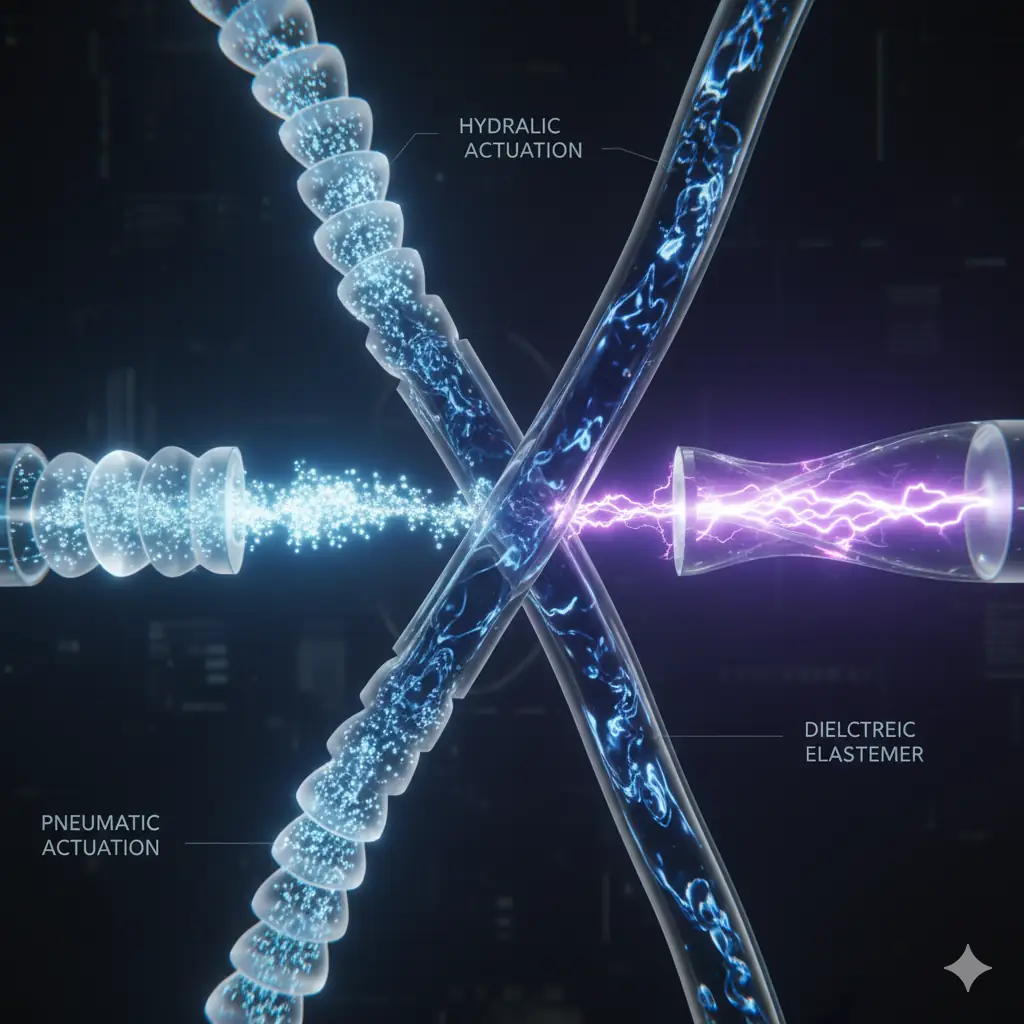
🔄 Comparing Actuation Methods
The choice of actuation method is one of the most fundamental decisions in soft robot design, balancing factors like speed, force, complexity, and energy efficiency.
- Pneumatics: Best for rapid movement, safety around humans, and complex bending motions (e.g., medical robots).
- Hydraulics: Best for high force and load capacity, often used in large-scale soft manipulators (e.g., heavy industrial tasks).
- Dielectric Elastomers: Best for silent, miniaturized, untethered movement where speed and precision are required (e.g., micro-robotics or wearables).
This diversity of motorless movement ensures that soft robots can be tailored precisely to the demands of any task, from gently picking a raspberry to assisting with human locomotion.
 By
By