🛠️ The Art of Creation: Building a Soft Body
Creating a rigid robot is primarily about assembling metal and plastic components. But building a soft robot is a fundamentally different process; it’s less about assembly and more about material shaping and curing.
The success of a soft robot hinges entirely on its precise internal structure—the tiny air channels, embedded sensors, and varying wall thicknesses that dictate its movement. These features must be perfectly formed from compliant materials.
To achieve this complexity, soft robotics relies on a specialized toolkit of fabrication techniques, moving beyond simple shaping to create intricate, functional elastic structures. Let’s explore the primary methods used today.
—
🍶 Traditional Methods: Casting and Molding
Casting and molding are the time-tested foundation of soft robot fabrication, particularly when working with common materials like silicone and other elastomers. They allow for the creation of very high-quality, seamless parts with excellent mechanical properties.
Lost-Wax and Negative Mold Casting
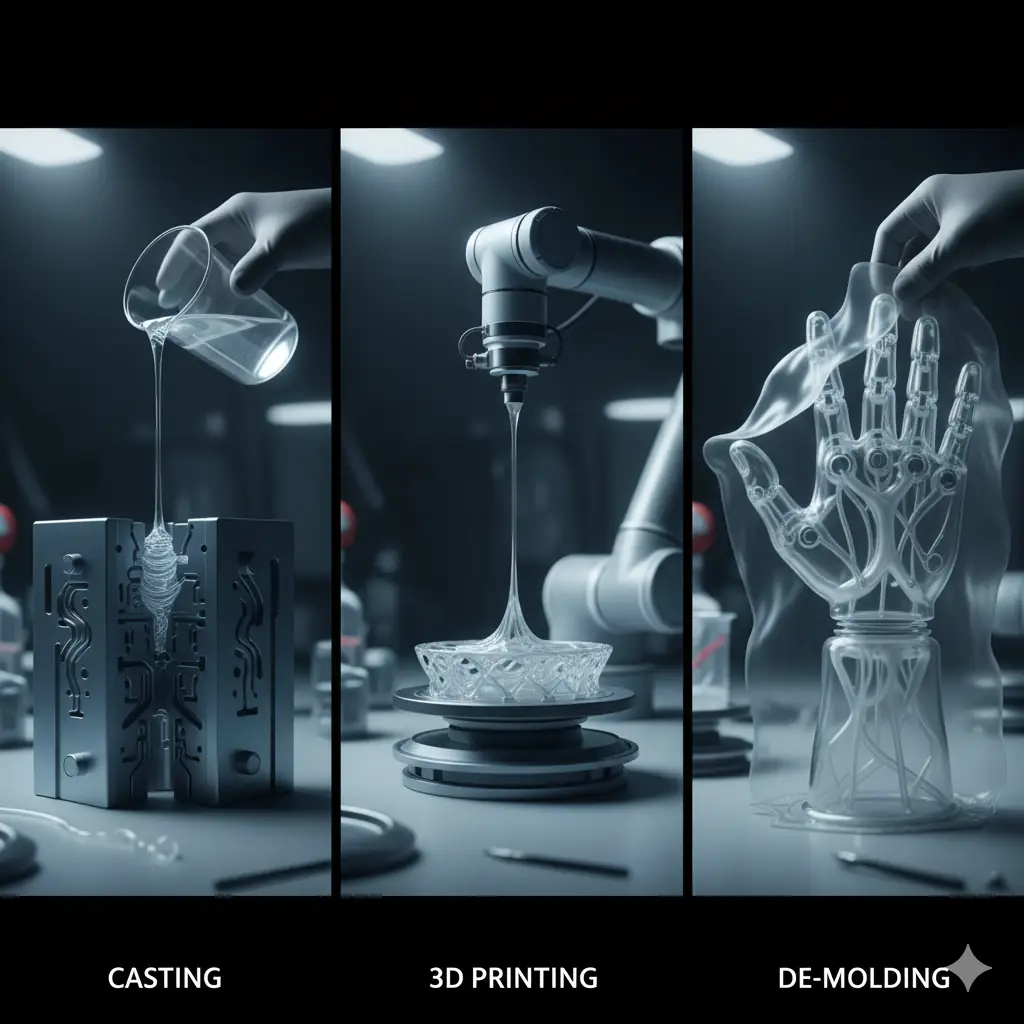
This technique begins with creating a rigid, positive mold that represents the final robot shape, including all internal channels. This mold is often made using traditional hard 3D printing or machining.
The liquid elastomer (e.g., uncured silicone) is then poured into the mold cavity, where it fills all the intricate details. After curing (hardening), the soft robot structure is carefully removed from the mold.
Molding offers superior surface finish and material consistency, which is vital for the reliable operation of pneumatic actuators. However, creating the mold itself can be slow, and modifications require redesigning the entire mold.
Soft Lithography (Micro-Molding)
For micro-scale soft robots, such as those used in drug delivery, researchers often turn to a technique adapted from the semiconductor industry called soft lithography. This involves using a patterned master mold to replicate features at the micrometer scale.
This allows for the creation of ultra-fine internal structures necessary for miniature fluidic actuators or integrated soft sensors. It is essential for high-precision, small-scale medical devices.
—
🖨️ The Digital Frontier: 3D Printing Softness
3D printing, or additive manufacturing, has revolutionized soft robotics by offering unparalleled speed and complexity in prototyping. It allows engineers to move quickly from a digital design to a physical, functional robot.
Direct Ink Writing (DIW)
DIW is highly utilized in soft robotics. It works by extruding a viscous, fluid polymer ‘ink’ (often a custom silicone mix) layer by layer through a fine nozzle. This allows for precise control over the material deposition.
A major advantage is the ability to print complex internal features, such as actuator channels, without needing to disassemble a mold. This simplifies the creation of monolithic (single-piece) soft robots.
Furthermore, DIW allows for printing multiple materials into a single structure, such as printing a soft silicone body with stiff thermoplastic supports embedded within it for localized reinforcement.
Multi-Material and Vat Photopolymerization
Advanced 3D printing methods can also create multi-material soft robots. For instance, processes using UV light to cure liquid resins (vat photopolymerization) can print both rigid components and flexible elastomers simultaneously.
This enables the fabrication of soft grippers that include flexible fingers for compliance and rigid connection points for mounting onto a traditional robotic arm—all in one print run.
—
🔄 Hybridization: The Best of Both Worlds
Few complex soft robots are created using only one method. Modern fabrication often involves hybrid approaches that leverage the strengths of both molding and printing.
- Printed Molds: Rapid prototyping uses 3D printing to quickly create the rigid molds needed for casting, reducing the time required to iterate on a new soft design.
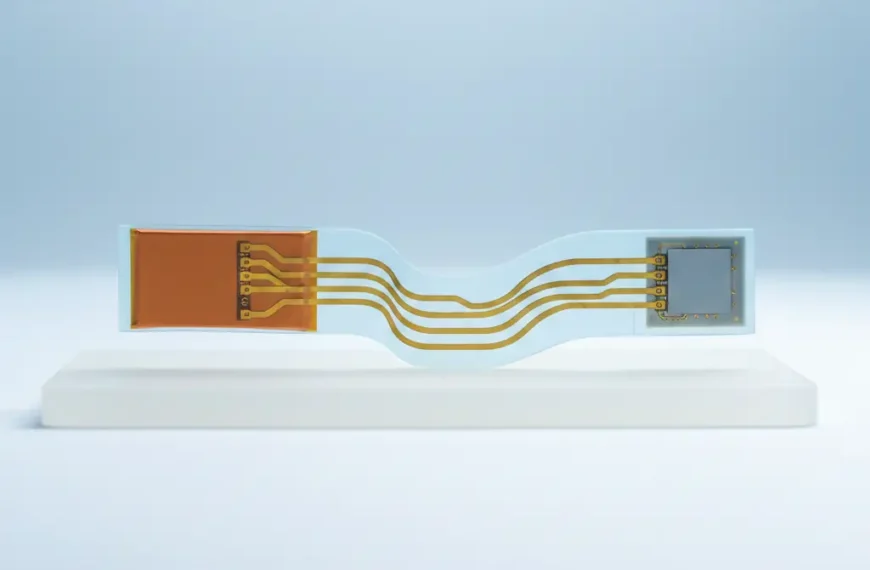
- Insert Molding: Pre-fabricated components—like rigid chips, micro-LEDs, or fluidic ports—are placed into a mold before the elastomer is poured. The curing material then encapsulates these rigid inserts, integrating them seamlessly into the soft body.
- Over-Molding: A final soft layer of silicone might be cast over a 3D-printed core structure to improve surface finish, biocompatibility, or reduce friction for better grip.
This systematic, multi-step approach is crucial for building functional soft systems that must contain complex electronics and actuators within their flexible shells.
—
📈 Comparison of Fabrication Techniques
The choice between methods depends heavily on the robot’s function, material, and the scale of production required.
- Casting/Molding: Ideal for high-volume production, complex internal features, and superior material performance (better air-tight seals).
- 3D Printing (DIW): Ideal for rapid prototyping, quick design iteration, and integrating multiple materials into one piece.
As 3D printing technology for compliant materials continues to mature, we are seeing a convergence, allowing for faster, more customized, and more complex soft robots to emerge from research labs and enter commercial applications.
—
🌟 The Path to Customization
The ability to rapidly customize and fabricate soft robots is essential for their future. Imagine a prosthetic hand needing a perfect custom fit for a patient, or a surgical tool requiring a unique bend for a specific procedure.
These advanced fabrication techniques ensure that soft robotics can deliver highly personalized, adaptable solutions, rather than being confined to mass-produced, one-size-fits-all designs. This flexibility in manufacturing truly matches the flexibility of the machines themselves.
 By
By