🤖 The Dawn of Soft Robotics
For decades, the image of a robot involved rigid metal arms, precise movements, and heavy machinery. While industrial robots excel in controlled factory settings, their inherent stiffness makes them clumsy and potentially dangerous around humans or delicate objects.
Soft robotics represents a revolutionary shift in engineering, moving away from metal skeletons and gears toward flexible, compliant materials. This field takes direct inspiration from biological organisms, seeking to replicate the adaptability and safety of life.
At its heart, this discipline challenges the core assumption that a robot must be stiff to be effective. Instead, it proposes that a body’s physical properties—its softness—can solve complex problems that rigid hardware cannot.
—
💡 Defining Features: What Makes a Robot ‘Soft’?
The distinction between a soft robot and a traditional one lies primarily in the materials and methods of actuation. It’s less about aesthetics and more about fundamental material science.
Materials: The New Compliant Components
Unlike conventional robots built from steel, aluminum, and hard plastics, soft robots heavily utilize elastomers. These are materials like silicone rubber, hydrogels, and various flexible polymers.
The compliance of these materials allows the robot’s body to deform and conform to its environment, absorbing impacts and navigating complex, unstructured spaces. Imagine a soft octopus arm instead of a rigid claw.
This material choice provides an intrinsic safety feature; if a soft robot bumps into a person or a delicate object, the impact is distributed and minimized due to the material’s ability to yield.
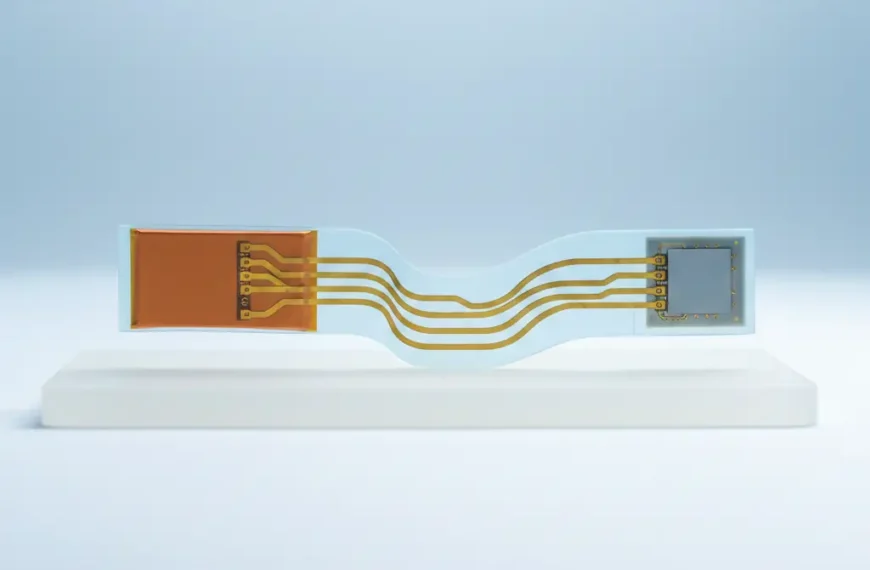
Actuation: Powering the Flexibility
Traditional robots rely on electric motors and gears (servos) for movement. Soft robots, conversely, often employ actuation methods that are compatible with their flexible structure, such as pneumatics or hydraulics.
For instance, Pneumatic Networks (PneuNets) use pressurized air to inflate chambers within the soft body. When inflated, the chambers expand and curl the structure, mimicking the action of a muscle.
This method allows for simple, powerful movements without needing complex mechanical joints, drastically reducing the component count and potential points of failure.
—
🌱 The Philosophy of Bio-inspiration and Embodied Intelligence
The conceptual bedrock of soft robotics is the deep study of natural systems. From the fluid movement of a jellyfish to the intricate grip of an elephant’s trunk, nature provides the blueprints for these compliant machines.
Nature’s Design Principles
Nature rarely uses rigid, hinged joints. Instead, biological structures like muscles and tendons utilize continuous, compliant deformation to achieve complex locomotion and manipulation. This is the goal of soft robotics.
By mimicking the geometry and material properties of living things, engineers can create systems that are inherently more robust and energy-efficient than their rigid counterparts.
Embodied Intelligence
A key concept is embodied intelligence (or morphological computation). This means that the physical body—the robot’s shape, flexibility, and compliance—does some of the ‘thinking’ that would otherwise require complex programming.
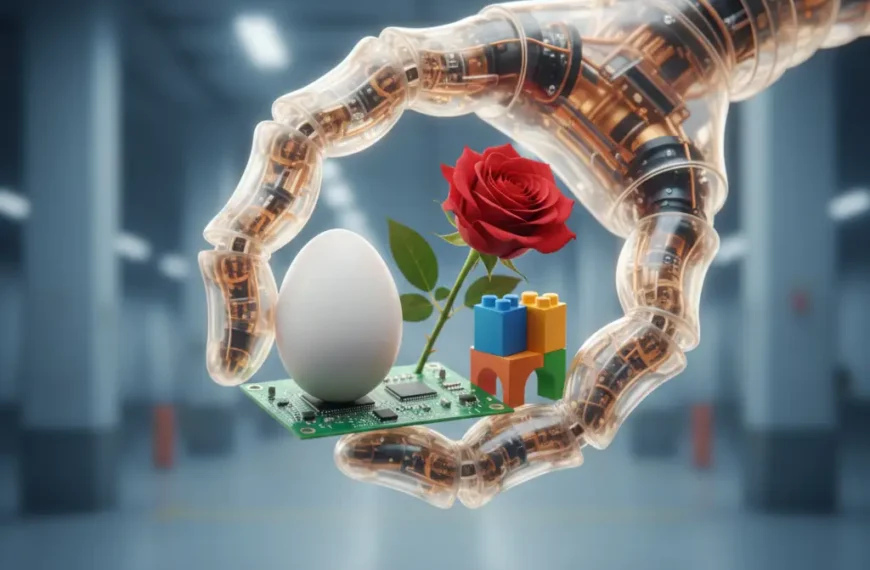
For example, a soft gripper doesn’t need sophisticated vision to precisely calculate the grip points of an object; its flexible fingers simply wrap around the object’s form, achieving a secure hold automatically.
The intelligence is ’embedded’ in the body’s structure, simplifying the control algorithm and allowing for spontaneous adaptation to unexpected situations.
—
📊 Soft vs. Rigid: A Quick Comparison
To fully grasp the scope of this new field, it helps to see how the two robotic approaches measure up in common applications.
| Feature | Soft Robots | Traditional Rigid Robots |
|---|---|---|
| Materials | Elastomers, Gels, Flexible Polymers | Metals, Hard Plastics |
| Safety (Interaction) | High (Conformable, low impact) | Low (Stiff, high-impact) |
| Adaptability | High (Conforms to varied shapes) | Low (Requires pre-programmed precision) |
| Precision/Speed | Lower Speed, Lower Precision | High Speed, High Precision |
| Applications | Medicine, Consumer Goods, Search & Rescue | Manufacturing, High-Speed Assembly |
—
🔬 Applications and The Road Ahead
The unique properties of soft robots make them ideal for tasks where human safety, delicacy, and environmental unpredictability are major concerns.
Revolutionizing Medical Care
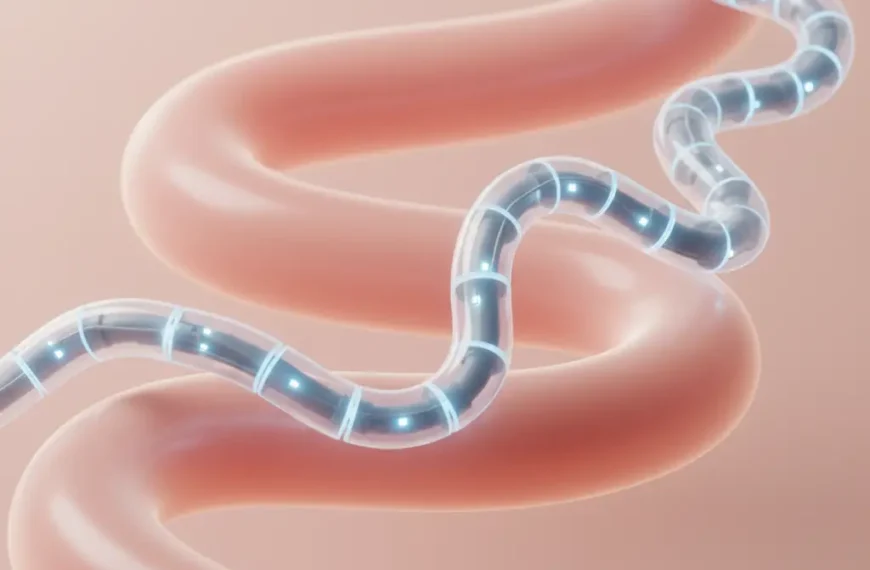
In medicine, soft robotics is paving the way for safer, less invasive procedures. Soft endoscopes and surgical tools can navigate the complex, sensitive passages of the human body without causing damage.
Furthermore, soft exoskeletons and assistive devices can offer gentle, compliant support for rehabilitation, feeling more like a wearable garment than a machine.
Handling Delicate Goods
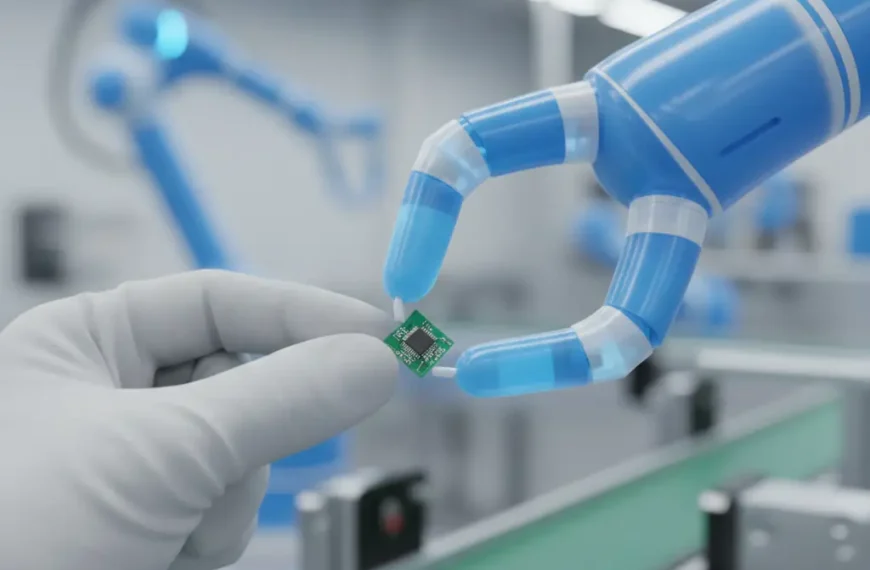
In logistics and agriculture, soft grippers can handle fragile items like fruit, eggs, or delicate electronics without crushing them. This eliminates the need for highly complex vision systems that rigid grippers rely upon.
These grippers simply envelop the object, using the compliance of the material to distribute the force evenly and gently.
—
🛠️ Tips for Understanding Emerging Robotics
Key Concepts to Focus On
- Compliance: Understand that this is the defining term—the ability to deform or yield when a force is applied.
- Trade-offs: Recognize that soft robotics trades high precision and speed for adaptability and safety.
- Actuation: Focus on non-traditional methods like pneumatics and hydraulics rather than standard electric motors.
—
📝 Notes on Challenges
While exciting, the field is still young and faces challenges. Precise control of soft bodies is mathematically complex due to their infinite deformation points.
Further, finding compliant materials that can withstand high forces and repeated, long-term use remains an ongoing area of research and development.
 By
By