🔗 Cutting the Cord: The Challenge of Untethered Robotics
Most soft robots built in university labs are currently ‘tethered.’ This means they rely on a hose or cable connected to an external system for power, air pressure, or complex control signals. While useful for controlled testing, this dependency severely limits their real-world application.
The goal of true soft robotics is untethered mobility—creating self-contained, autonomous machines that can operate independently. This means successfully integrating power, control, and actuation into the robot’s flexible body.
Developing fully autonomous soft robots is a tremendous challenge, requiring engineers to miniaturize components and invent entirely new ways for soft bodies to manage rigid technology.
—
🔋 Powering the Compliance: Energy Management
The biggest hurdle for untethered soft robots is energy storage. Traditional power sources like lithium-ion batteries are rigid, heavy, and potentially dangerous if punctured, all of which conflict with the soft, flexible nature of the robot’s body.
Flexible Batteries and Soft Power
Researchers are developing flexible batteries that can bend and twist without losing performance or safety. These batteries can be laminated or printed directly onto the robot’s compliant skin, spreading the weight and maintaining the robot’s overall flexibility.
Beyond batteries, some robots explore alternative power sources. For instance, tiny aquatic robots might use a chemical reaction with water to generate propulsion, essentially carrying their own chemical ‘fuel.’
This pursuit of soft, distributed power is essential for creating truly free-moving, resilient autonomous systems. The power source must become part of the body, not a separate, rigid component.
—
🧠 The Onboard Brain: Control and Sensing
An autonomous robot needs an onboard ‘brain’—a micro-controller or computer—to process sensor data and make real-time decisions. This brain must be small, lightweight, and robust enough to handle the complex computations needed for soft body control.
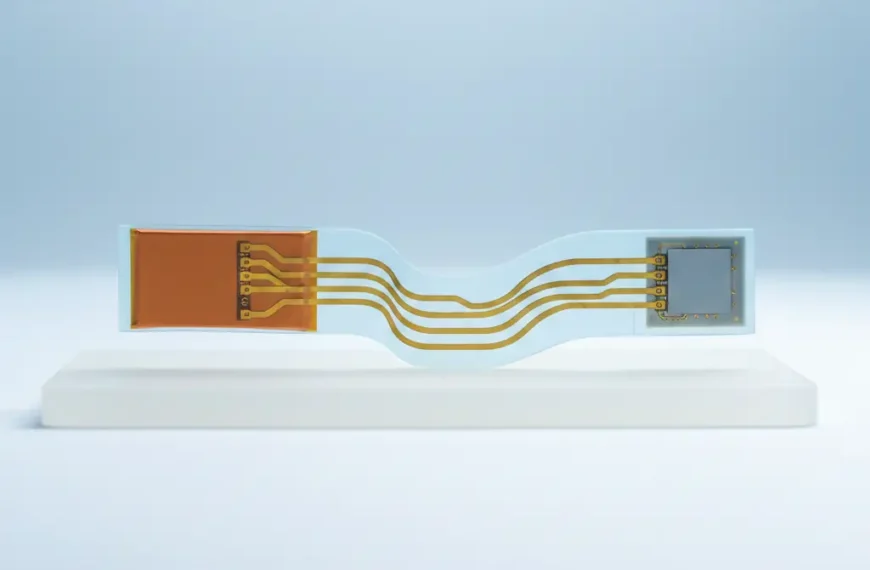
Miniaturization and Encapsulation
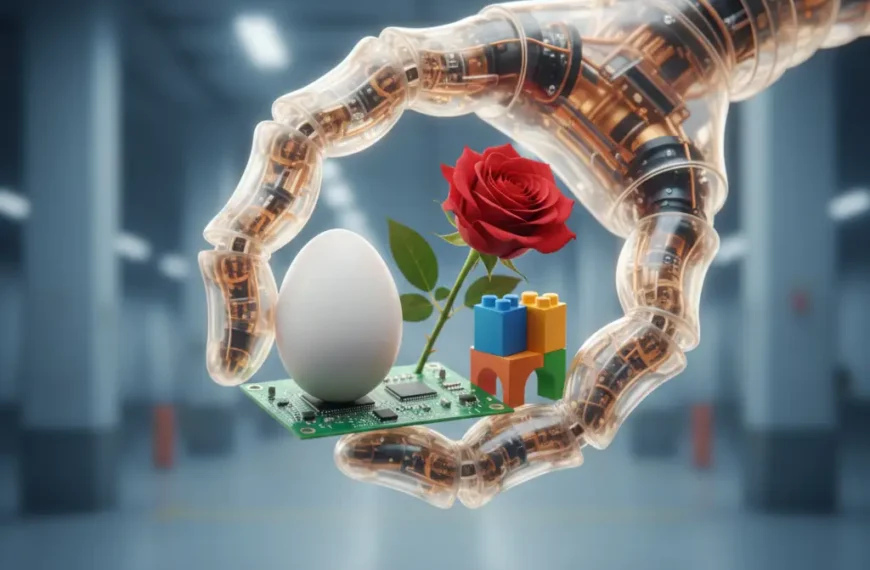
Integrating traditional rigid electronics into a flexible structure is achieved through clever encapsulation. Tiny circuit boards are often embedded in soft silicone matrices, isolating them from strain and external damage.
Furthermore, soft robots rely heavily on soft sensors—flexible components embedded in the skin that can measure stretch, pressure, and temperature. This data is fed to the onboard chip, allowing the robot to ‘feel’ its way through the environment.
For example, an untethered soft gripper needs to sense how hard it’s squeezing a fragile object, adjust its internal pressure, and make that decision instantaneously without communicating with an external computer.
—
💨 Closing the Loop: Integrating Actuation
In pneumatic soft robots, untethering requires integrating a miniature pump and valves directly onto the robot. This system must be powerful enough to generate the necessary forces while remaining compact and lightweight.
Similarly, robots using Dielectric Elastomers (DEs) for movement need a micro-power converter to generate the high voltage required for actuation. This entire system must work harmoniously with the onboard control unit.
Brief Insight: The shift from external to internal systems increases the overall complexity of the robot, demanding a high degree of integration where every component—from the battery to the valve—must be optimized for size and weight.
—
🌎 Applications of True Autonomy
The development of untethered soft robots unlocks vast possibilities across different sectors, moving them out of the lab and into harsh, unpredictable environments.
Unrestricted Exploration
Untethered soft robots can plunge into deep ocean trenches, navigate collapsed buildings during search and rescue missions, or crawl through pipelines in remote industrial facilities, far beyond the reach of a cable.
Medical and Wearable Freedom
For wearable devices, autonomy is non-negotiable. A stroke patient’s exosuit must be fully self-contained for use at home. Similarly, an endoscopic soft robot needs to navigate the human body without external air or power lines attached.
—
📈 Pros and Cons of Untethered Systems
While the benefits are clear, the engineering trade-offs are significant when designing fully autonomous soft systems.
| Pros of Untethered Systems | Cons / Challenges |
|---|---|
| Unlimited Range and Mobility | Limited Onboard Power Storage |
| No Cable Drag or Tangle Risk | Increased Complexity and Weight |
| Ideal for Remote/Hazardous Sites | Need for Robust, Miniaturized Components |
| Enhanced User Comfort (Wearables) | Higher Cost for Custom Flexible Electronics |
—
🌟 The Next Frontier
Untethered soft mobility is the horizon for the entire field of soft robotics. It represents the transition from academic curiosity to practical, deployable technology capable of solving real-world problems.
As micro-actuators become more efficient and flexible power sources improve, we will see these autonomous, self-contained soft robots become a commonplace sight, navigating the world with fluid grace and resilience.

 By
By